

Encounter space-time prediction method and system for non-tracking sailing ships in sea area
A prediction method and technology for ships, applied in two-dimensional position/channel control and other directions, which can solve the problem of unpredictable collision location and time, unable to deal with non-tracking ships, unpredictable meeting place and time of encountering ships And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
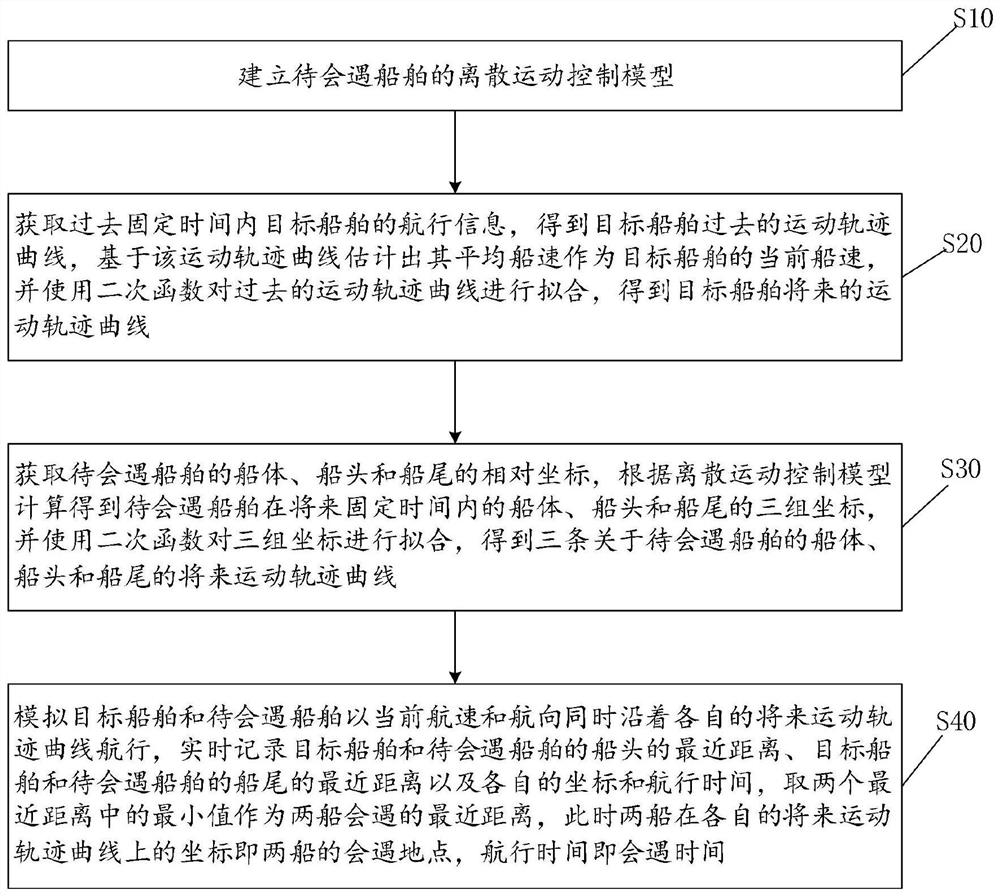
[0038] see figure 1 As shown, this embodiment provides an encounter spatiotemporal prediction method for non-tracking ships in sea areas, including the following steps:
[0039] S10: Establish a discrete motion control model of the ship to be encountered;
[0040] S20: Obtain the navigation information of the target ship in the past fixed time, obtain the past motion trajectory curve of the target ship, estimate its average ship speed as the current ship speed of the target ship based on the motion trajectory curve, and use the quadratic function to calculate the past motion curve The trajectory curve is fitted to obtain the future motion trajectory curve of the target ship;
[0041] S30: Obtain the relative coordinates of the hull, bow and stern of the ship to be encountered, and calculate and obtain three sets of coordinates of the hull, bow and stern of the ship to be encountered in a fixed time in the future according to the discrete motion control model, And use the qua...
Embodiment 2
[0059] The following is an introduction to an encounter spatiotemporal prediction system for non-tracking ships in sea areas disclosed in the second embodiment of the present invention. An encounter spatio-temporal prediction method for non-tracking ships in sea areas can be referred to each other.
[0060] The second embodiment of the present invention discloses a meeting space-time prediction system for non-tracking ships in sea areas, including:
[0061] a model building module, the model building module is used to build a discrete motion control model of the ship to be encountered;
[0062] A trajectory fitting module, the trajectory fitting module is used to obtain the navigation information of the target ship in the past fixed time, obtain the past motion trajectory curve of the target ship, and estimate its average ship speed as the current ship of the target ship based on the motion trajectory curve. and use the quadratic function to fit the past motion trajectory cur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More