Self-propelled orchard picking robot
A picking robot, self-propelled technology, applied in the field of agricultural robots, can solve the problem of low self-adaptive ability, achieve the effect of reducing movement, avoiding damage, and expanding the picking range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
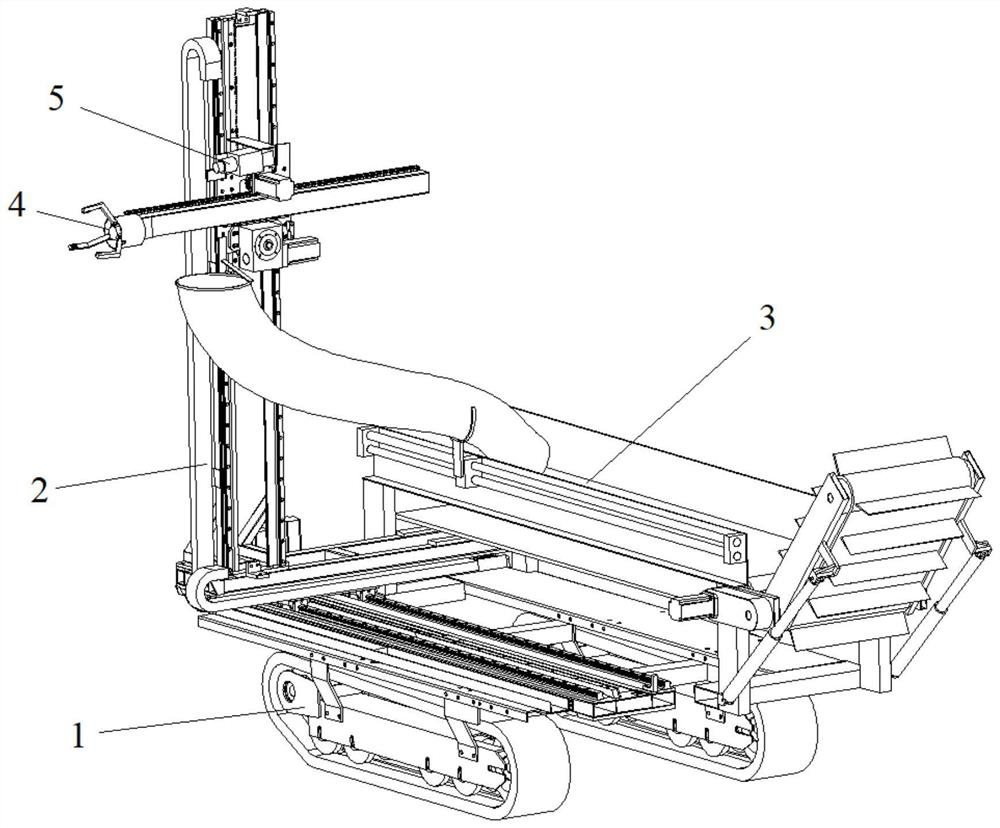
[0032] In a typical embodiment of the present invention, as Figure 1-Figure 5 As shown, a self-propelled orchard picking robot is proposed, including: a walking chassis 1 , a manipulator-assisted mobile platform 2 , a fruit conveying mechanism 3 , a manipulator 4 and a vision system 5 .
[0033] Among them, the walking chassis 1 is a crawler-type walking chassis, the manipulator auxiliary mobile platform 2 and the fruit conveying mechanism 3 are relatively fixedly arranged on both sides of the walking chassis 1, and the manipulator 4 and the vision system 5 are arranged on the manipulator auxiliary mobile platform 2.
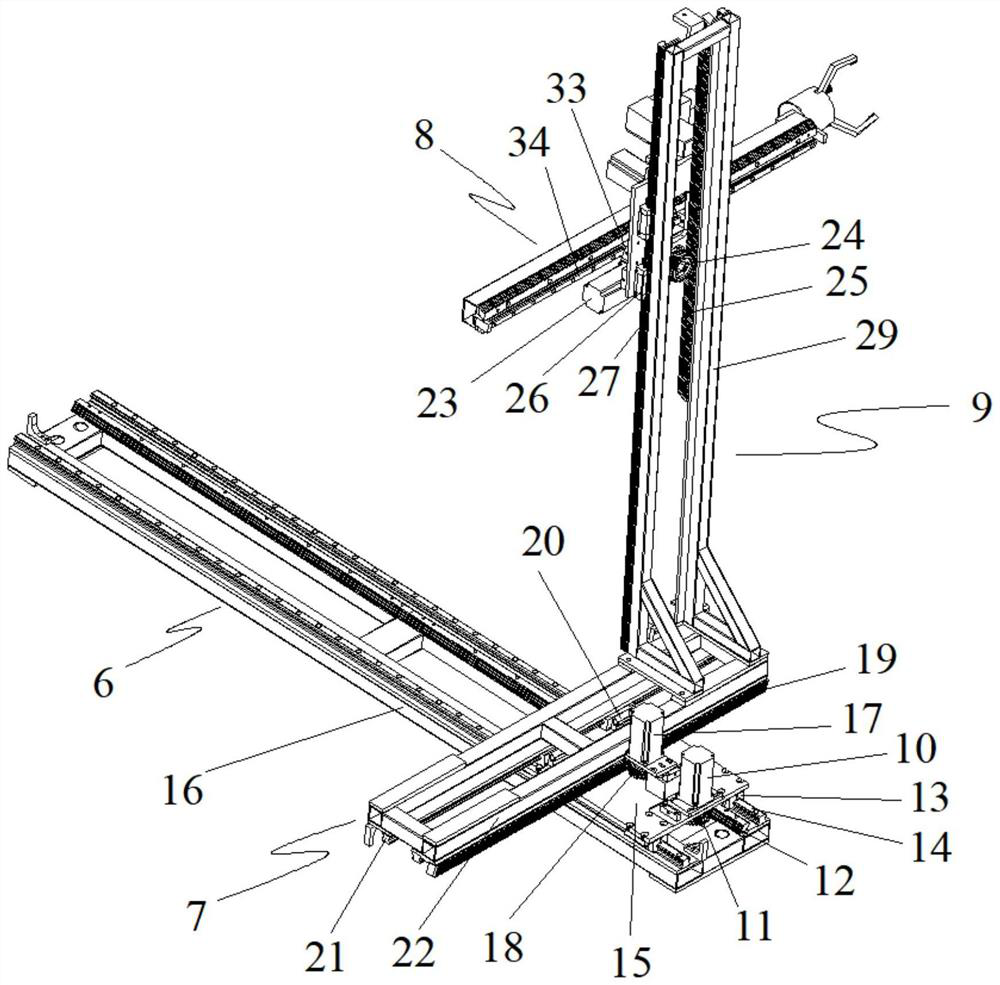
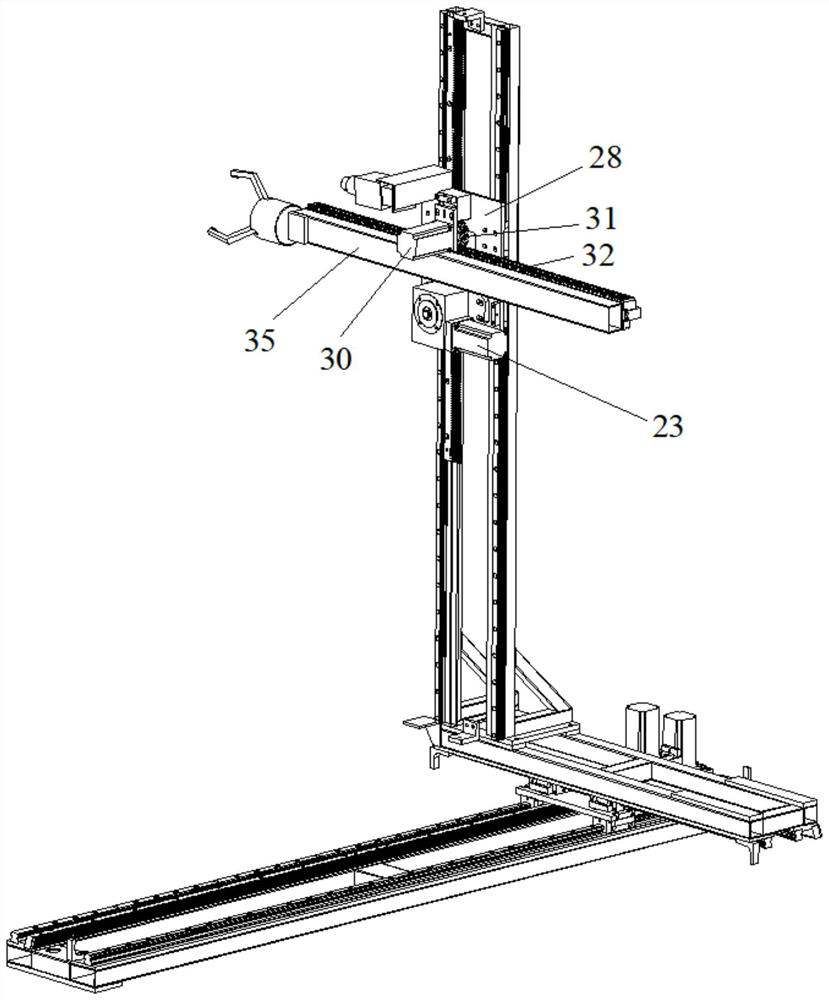
[0034] Specifically, as figure 2 , image 3 As shown, the robot-assisted mobile platform 2 is composed of an X-axis carriage 6, a Y-axis carriage and a Z-axis carriage 9, wherein the Y-axis carriage is further divided into a first Y-axis carriage 7 and a second Y-axis carriage 8.
[0035] The X-axis carriage 6 is fixedly arranged on one side of the travelin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More