

Pipeline detection robot
A pipeline detection and robot technology, applied in the direction of pipe components, special pipes, mechanical equipment, etc., can solve the problem that the pipeline detection mechanism is not suitable for driving, and achieve the effect of light weight, high buoyancy, and interference prevention.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
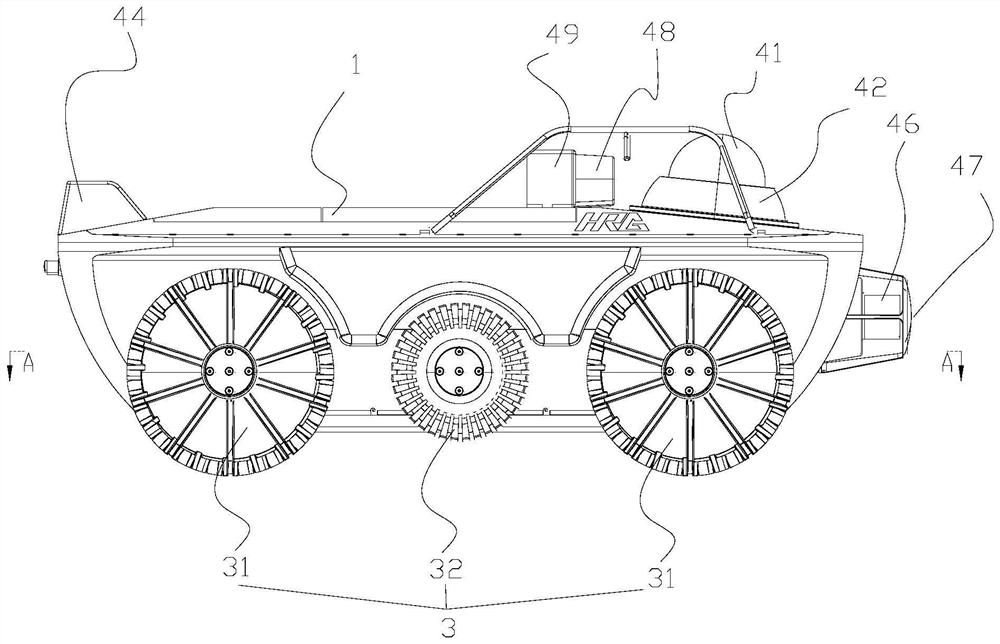
[0059] like Figure 1-Figure 6 As shown, the pipeline inspection robot includes a body assembly 1, a drive assembly 2, a wheel assembly 3, a detection assembly 4, and a power supply 5; the body assembly 1 is a sealed cavity inside, and the drive assembly 2 and the The power supply 5 is located inside the body assembly 1, the output end of the drive assembly 2 is connected to the wheel assembly 3, and the detection assembly 4 is connected to the outer surface of the body assembly 1; the drive assembly 2. The detection assembly 4 is connected to the power supply 5 . The power source 5 is a battery pack.
[0060] like Figure 7 , Figure 8 , Figure 9 As shown, the body assembly 1 includes a first casing 11, a second casing 12, a buoy 13, a counterweight block 14, a counterweight guide rail 15, a transmission mechanism cover 16, an inspection window cover 17, and a battery compartment case. Cover 18, guardrail 19;
[0061] The first casing 11 and the second casing 12 are th...
Embodiment 2
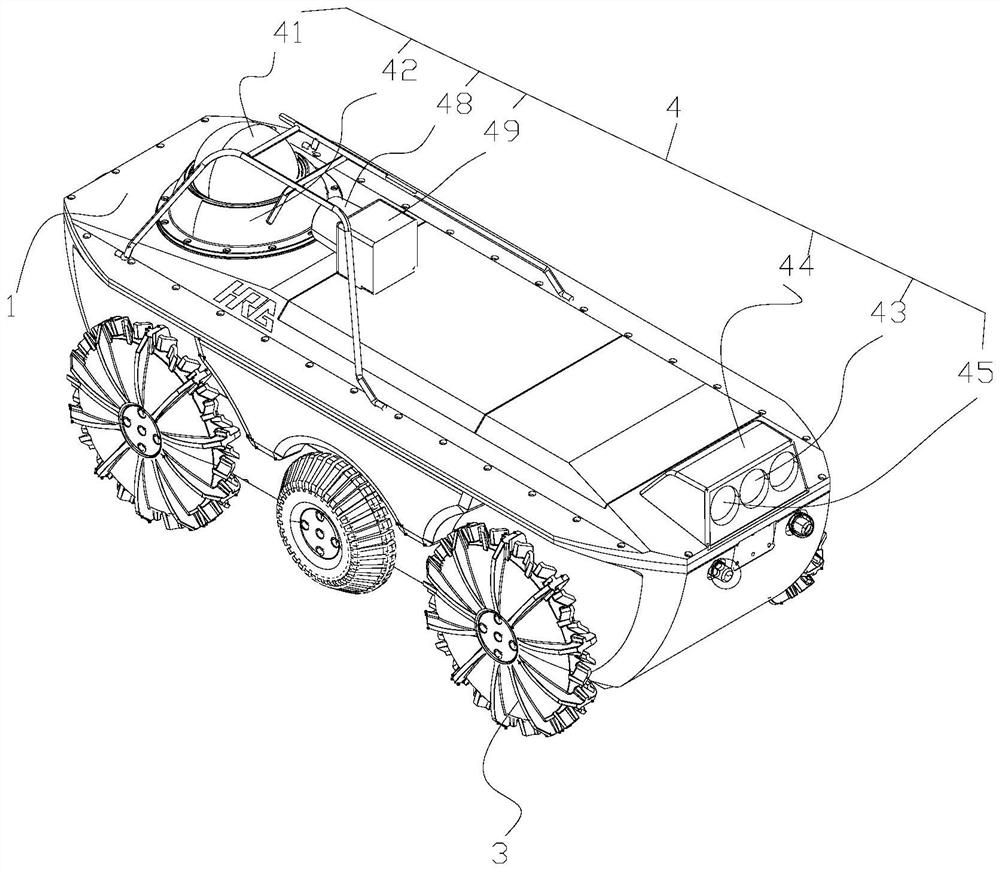
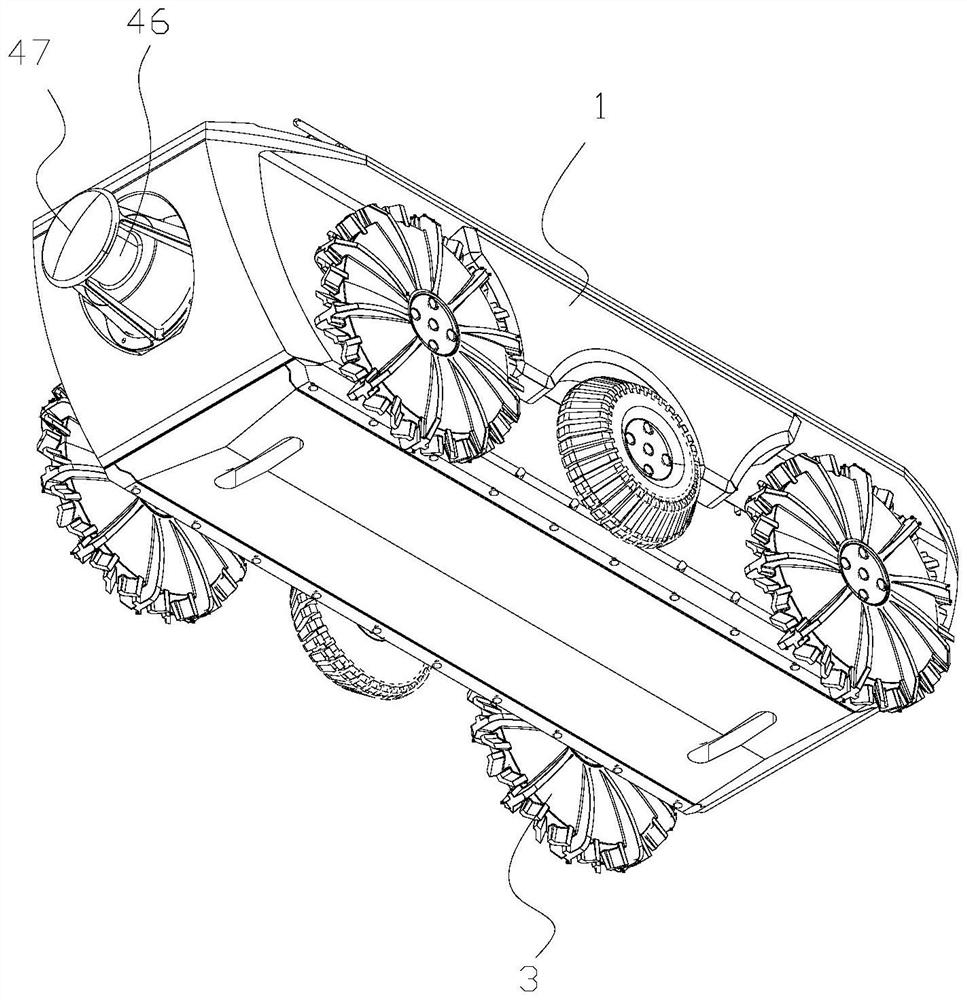
[0083] like figure 1 , figure 2 , image 3 As shown, on the basis of the above-mentioned first embodiment, the detection assembly 4 includes a front camera 41, a camera sealing cover 42, a rear view camera 43, a camera mount 44, a light 45, a sonar 46, and a sonar protection Cover 47, radar 48, radar mount 49;
[0084] Also refer to Figure 12 As shown, the front camera 41 is located in the camera sealing cover 42, the camera sealing cover 42 is connected to one end of the first housing 11, the camera sealing cover 42 is a circular structure, and its edge has a connecting hole, The front camera 41 is a pan-tilt camera, which can meet the defect detection requirements of the pipeline during the robot's traveling process, and can realize partial defect observation and image recording on the water surface through lens rotation, tilt, and zoom. In order to reduce the blind spot in the front, the installation is inclined downward at a certain angle, and the angle is almost 6-1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More