

Robot telescopic arm
A telescopic arm and robot technology, applied in the field of robots, can solve problems such as hidden safety hazards, harsh working environment, frequent splashing of hot materials, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
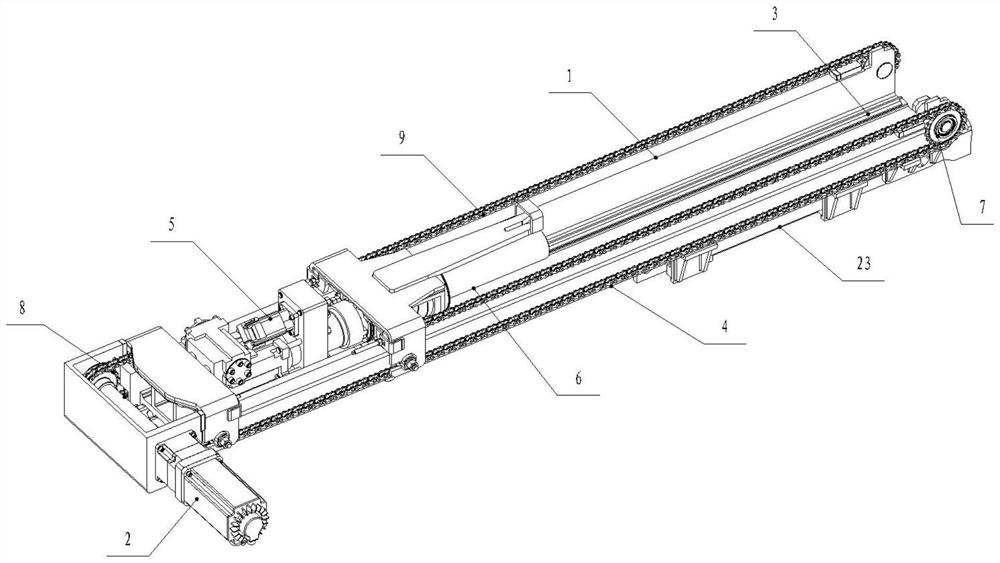
[0035] Embodiment 1: Combining Figure 1-Figure 10This embodiment will be described. A robotic telescopic arm of this embodiment includes a bracket assembly 1, a telescopic drive member 2, a guide rail 3, a telescopic transmission assembly 4, a mobile trolley 5 and a grabbing actuator 6. The upper part of the bracket assembly 1 is provided with There are guide rails 3, the bracket assembly 1 is connected with the moving trolley 5 through the guide rails 3, the rear end of the bracket assembly 1 is provided with a telescopic drive part 2, the bracket assembly 1 is connected with the telescopic transmission assembly 4, and the telescopic drive part 2 is connected with the telescopic transmission The assembly 4 is connected, the telescopic transmission assembly 4 is installed with the mobile trolley 5, the mobile trolley 5 is provided with a grabbing actuator 6, the number of the telescopic transmission assembly 4 is two groups, and the two sets of the telescopic transmission asse...
specific Embodiment approach 2
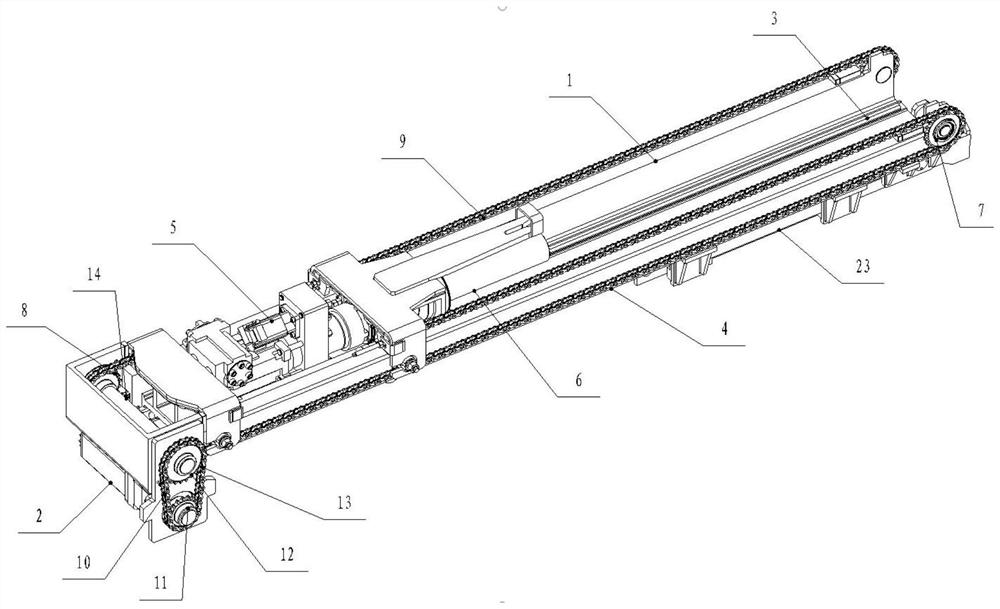
[0036] Specific implementation mode 2: Combining Figure 1-Figure 10 This embodiment will be described. A robotic telescopic arm of this embodiment includes a bracket assembly 1, a telescopic drive member 2, a guide rail 3, a telescopic transmission assembly 4, a mobile trolley 5 and a grabbing actuator 6. The upper part of the bracket assembly 1 is provided with There are guide rails 3, the bracket assembly 1 is connected with the moving trolley 5 through the guide rails 3, the rear end of the bracket assembly 1 is provided with a telescopic drive component 2 and a first-level telescopic transmission assembly 10, and the bracket assembly 1 is connected with the telescopic transmission assembly 4, The first-level telescopic transmission assembly 10 is respectively established and installed with the telescopic drive component 2 and the telescopic transmission assembly 4, and the telescopic transmission component 4 is established and installed with the mobile trolley 5. The mobil...
specific Embodiment approach 3
[0037] Specific implementation three: combination Figure 1-Figure 10 This embodiment will be described. A robotic telescopic arm of this embodiment includes a bracket assembly 1, a telescopic drive member 2, a guide rail 3, a telescopic transmission assembly 4, a mobile trolley 5 and a grabbing actuator 6. The upper part of the bracket assembly 1 is provided with There are guide rails 3, the bracket assembly 1 is connected with the moving trolley 5 through the guide rails 3, the rear end of the bracket assembly 1 is provided with a telescopic drive component 2 and a first-level telescopic transmission assembly 10, and the bracket assembly 1 is connected with the telescopic transmission assembly 4, The first-level telescopic transmission assembly 10 is respectively established and installed with the telescopic drive component 2 and the telescopic transmission assembly 4, and the telescopic transmission component 4 is established and installed with the mobile trolley 5. The mobi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More