Hand virtual-real interaction system
An interactive system and hand technology, applied in the field of virtual-real interaction, can solve problems such as easy fracture of joint joints, incomplete functions of the host computer, mixed interference signals, etc., to achieve intuitive and clear observation and management, solve data transmission problems, and interact good sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
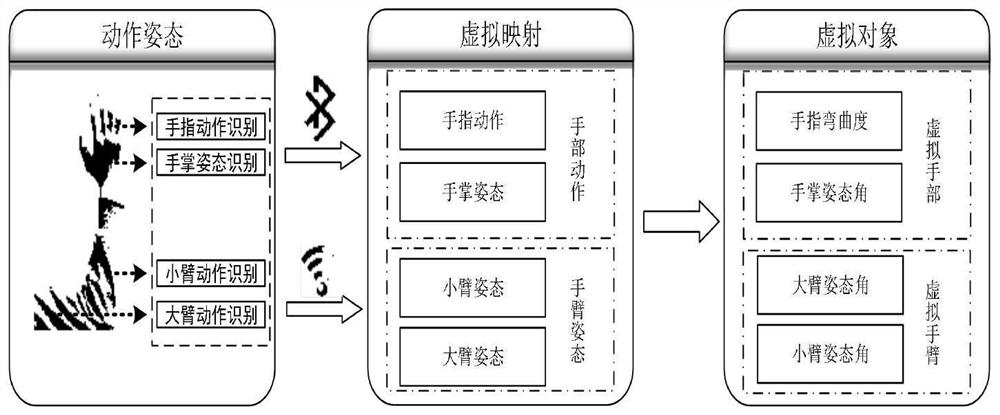
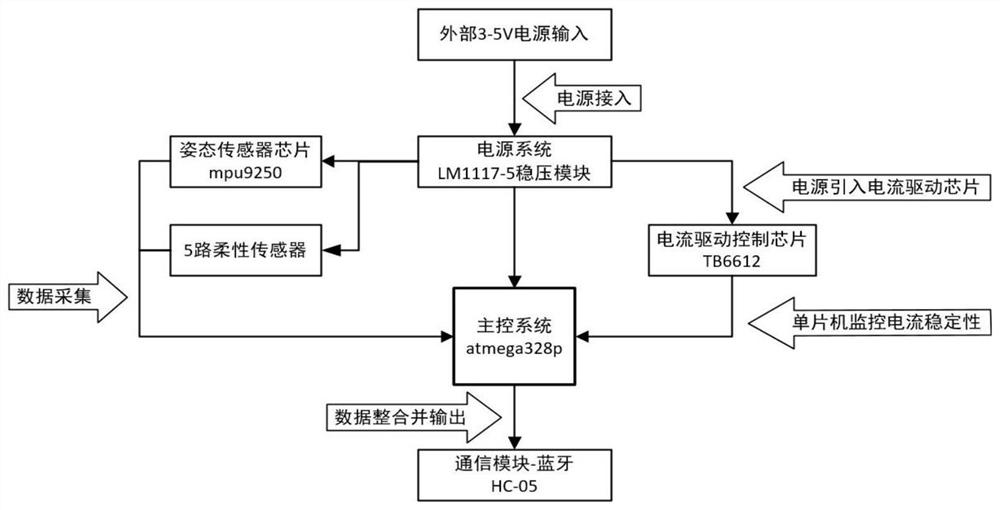
[0072] At present, the existing problems of data gloves at home and abroad should be optimized and improved accordingly. First, select a reasonable technical solution, and use the relationship between the output voltage of the flexible sensor and the degree of bending to calculate the movement information of the finger. The attitude sensor is fixed on the main body parts, and the attitude signal is transmitted to the microcontroller through wireless transmission methods such as Bluetooth for attitude calculation. The attitude sensor obtains the attitude information of the limbs through the integrated inertial sensors, gravity sensors, accelerometers, magnetometers and gyroscopes, and then combines the length information of the bones and the hierarchical connection relationship to calculate the spatial position of the joint points. Its small size allows the system to be attached to the user, suitable for some complex environments, so as to capture motion data more accurately and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More