

Motion control method for hot-line work eight-degree-of-freedom mechanical arm
A technology of live work and motion control, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unstable solution efficiency, achieve the effect of increasing operation reliability and improving angle control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
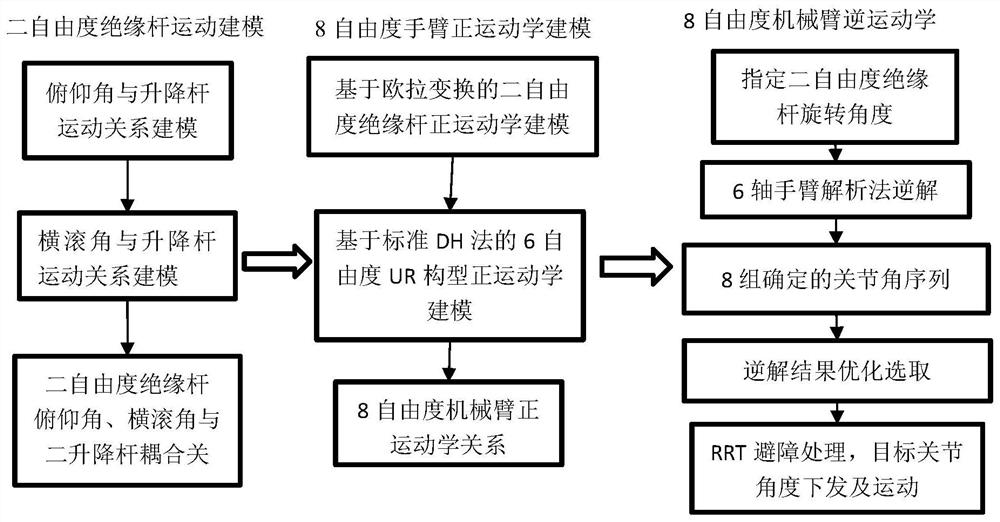
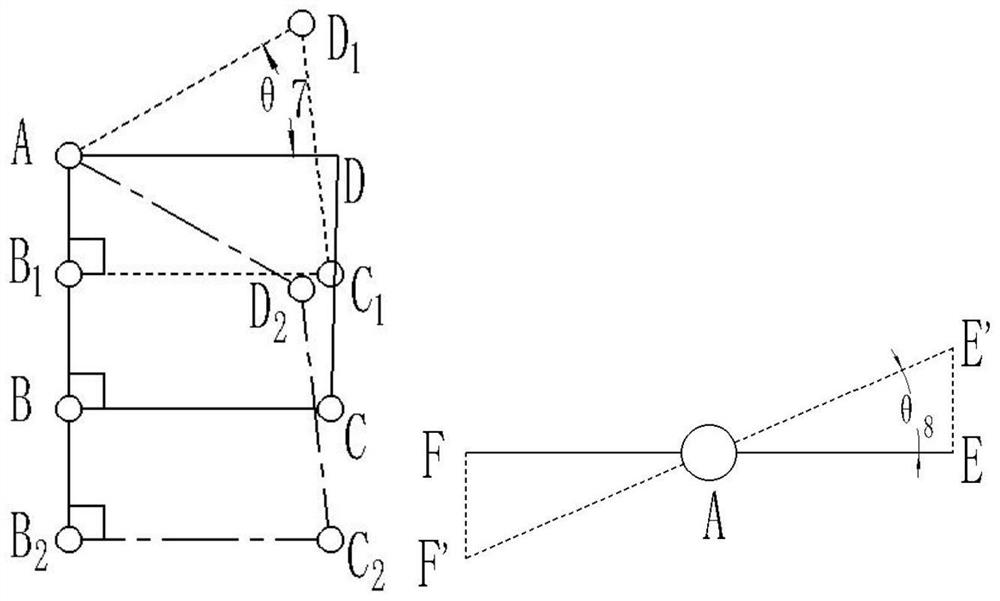
[0042] In the present invention, a 6-DOF UR configuration arm and a 2-DOF insulating rod are connected in series to form an 8-DOF live working manipulator, and the coupling relationship between the lifting rod and the pitch angle and roll angle is obtained by modeling the motion of the 2-DOF insulating rod. , which is convenient for subsequent control; the kinematics modeling of the 8-DOF arm is carried out, and the relationship betwee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More