

Virtual potential field cooperative obstacle avoidance topology control method based on heterogeneous unmanned aerial vehicle formation
A technology of topology control and virtual potential field, which is applied in three-dimensional position/channel control, mechanical equipment, combustion engine, etc., to achieve the effect of ensuring the global optimization of the system, avoiding oscillation, and solving the problem of falling into local extremum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The specific embodiments of the present invention are described below to facilitate those skilled in the art to understand the present invention, but it should be clear that the present invention is not limited to the scope of the specific embodiments. For those of ordinary skill in the art, as long as various changes Such changes are obvious within the spirit and scope of the present invention as defined and determined by the appended claims, and all inventions and creations utilizing the inventive concept are within the scope of protection.
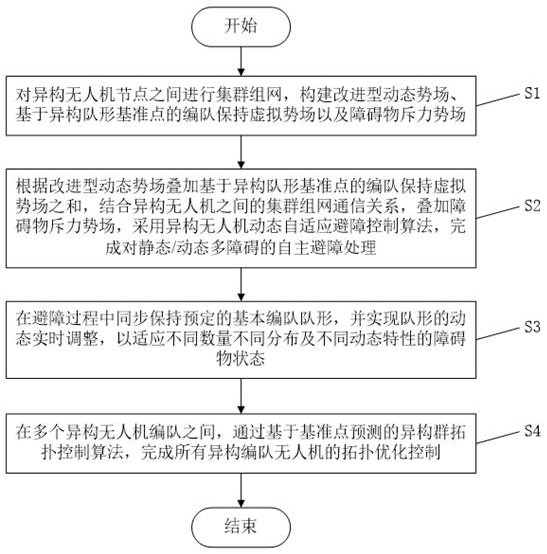
[0036] like figure 1 As shown in the figure, a topology control method for cooperative obstacle avoidance based on a virtual potential field of a heterogeneous UAV formation includes the following steps:
[0037] S1. Perform cluster networking among heterogeneous UAV nodes to construct an improved dynamic potential field, a virtual potential field for formation maintenance based on heterogeneous formation reference points, and an o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More