

Portable wheel-tracked double-swing-arm mobile robot
A mobile robot, double swing arm technology, applied in the field of robotics, can solve the problems of poor product adaptability, large overall size, and uncompact robot structure, and achieve the effect of high applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific embodiments of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments. The following examples are intended to illustrate the present invention, but not to limit the scope of the present invention.
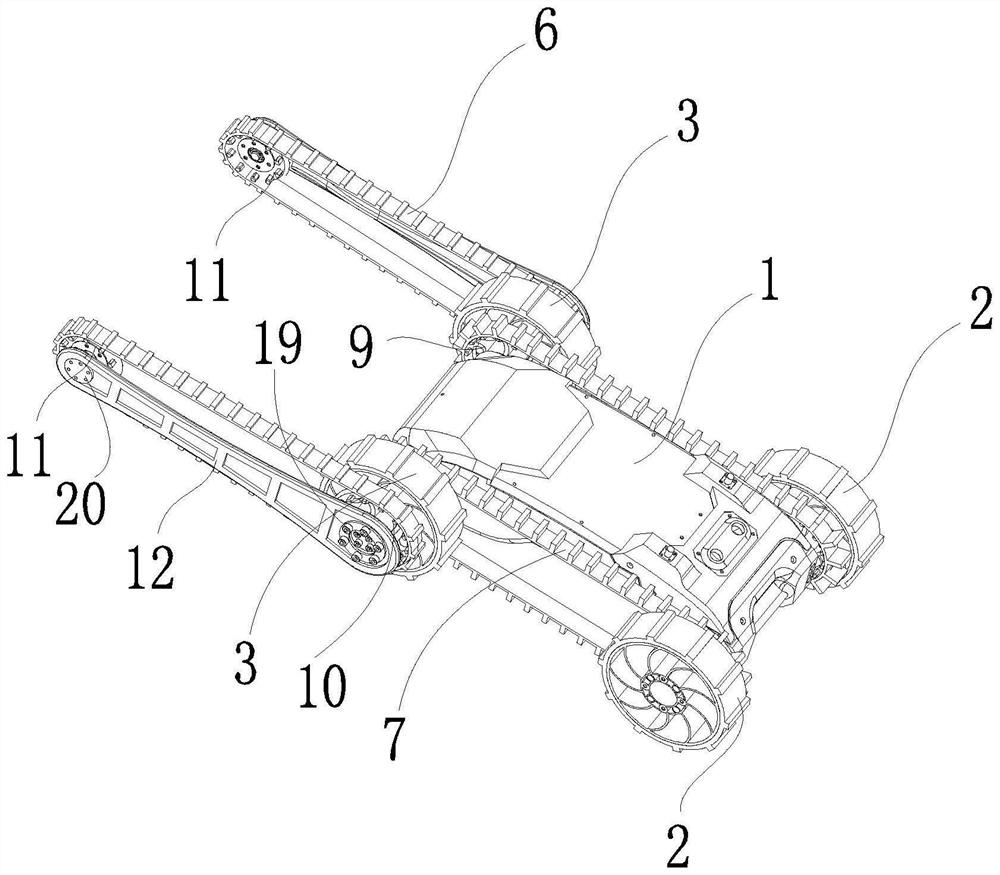
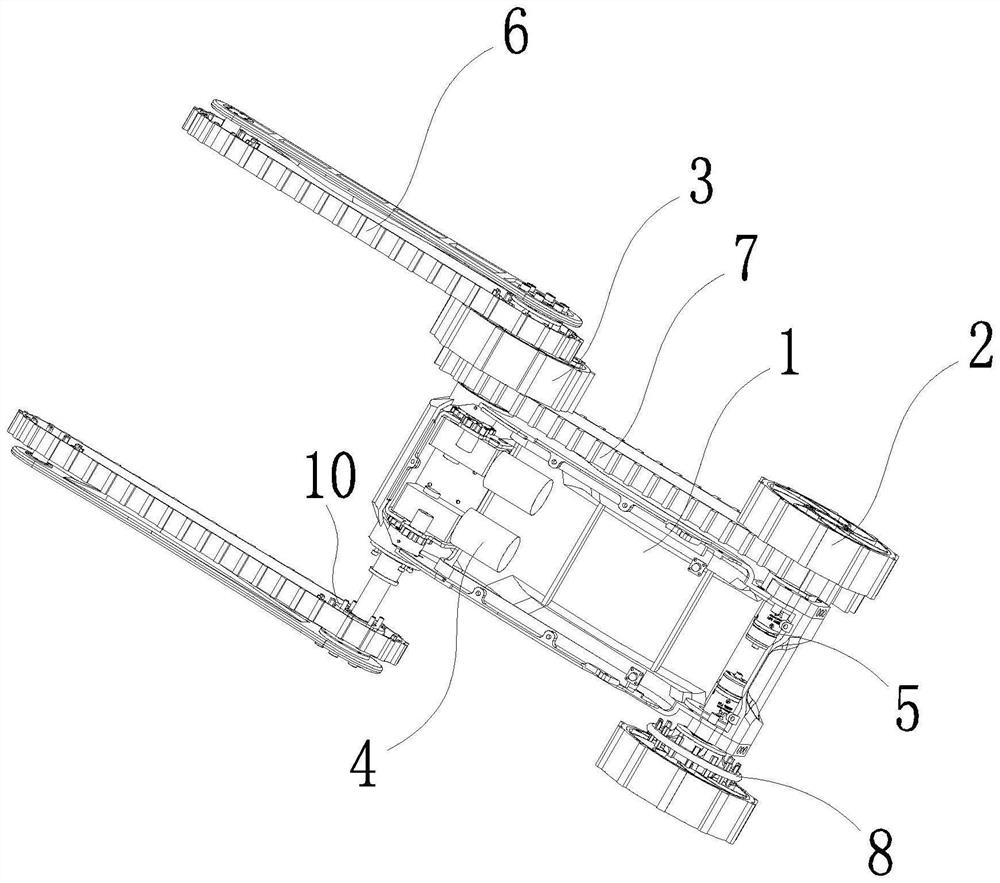
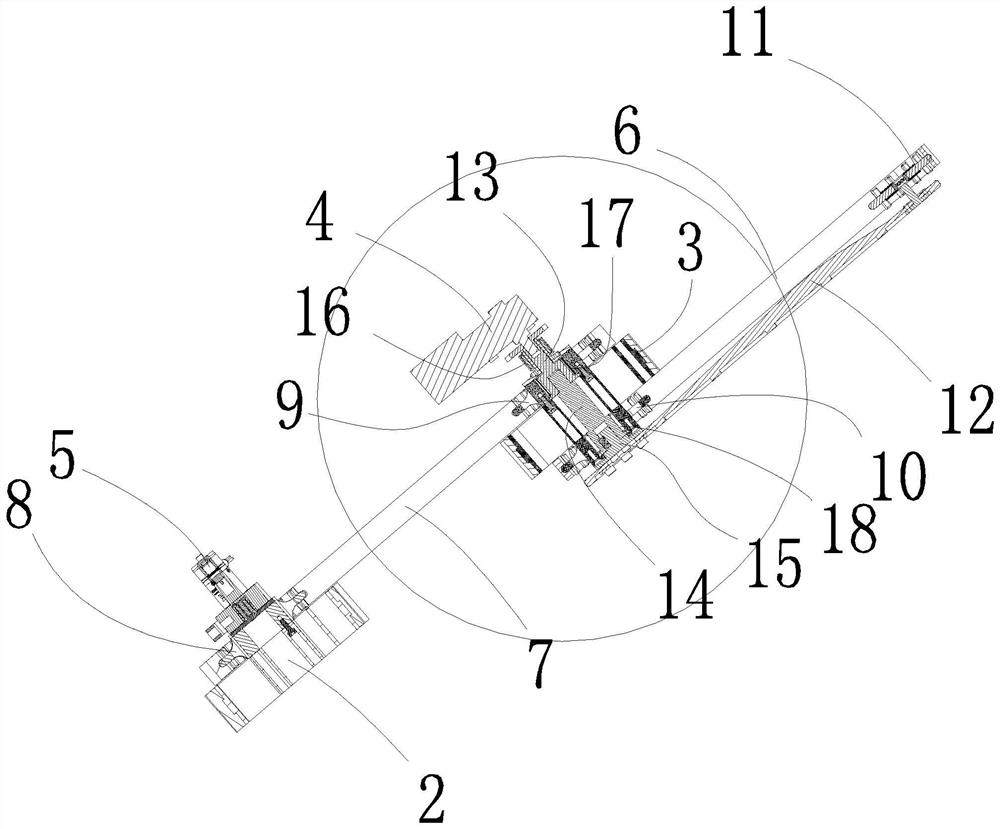
[0034] like Figure 1-9 As shown, a portable wheel-tracked double-swing arm mobile robot includes a chassis 1, such as figure 2 As shown, one end of the chassis 1 is provided with a driving wheel 2 and the other end is provided with a driven wheel 3 . The chassis 1 is provided with a swing arm motor 4 and a drive motor 5 , and the drive motor 5 provides power for the chassis crawler 7 and the swing arm crawler 6 . The swing arm motor 4 provides power for the rotation of the swing arm assembly.
[0035] The first track wheel 8, such as figure 1 and 2 As shown, the first crawler wheels 8 are arranged on both sides of the chassis 1 to be connected to the drive motor 5, and the first crawler whe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More