

Vacuum adsorption type four-corner starfish wall-climbing robot based on lifting platform mechanism
A wall-climbing robot and vacuum adsorption technology, applied in the field of exterior wall cleaning, can solve problems such as hidden safety hazards and low work efficiency for workers, and achieve the effects of improving capacity, stable power source, and enhancing adsorption capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to better express the technical solutions and beneficial effects of the entire invention, the present invention will be further described in detail below with reference to the accompanying drawings.
[0027] Initial state:
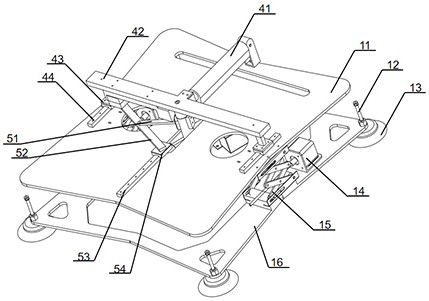
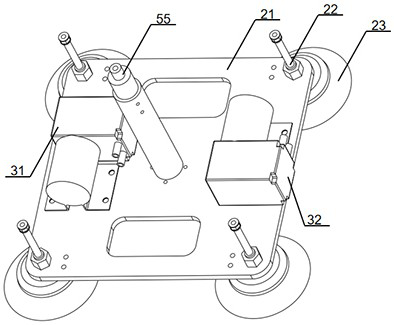
[0028] The first air pump 31 and the second air pump 32 are activated, the second suction cup 23 and the first suction cup 13 begin to inhale, and an approximate vacuum is formed between the second suction cup 23 and the first suction cup 13 and the wall, and is firmly adsorbed on the wall.
[0029] Movement process:
[0030] Step 1: The second suction cup 23 is lifted
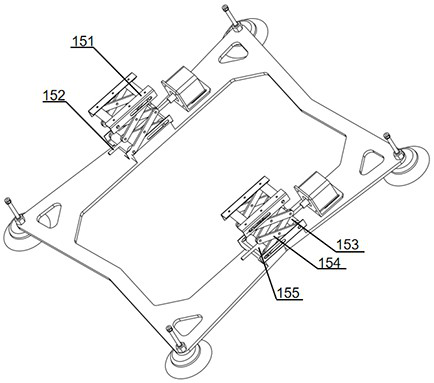
[0031] The first air pump 31 stops working, the second suction cup 23 releases the vacuum adsorption, the first step motor 14 drives the screw screw 152 to rotate, and controls the scissor arm 154 to extend, so that the four-corner starfish top plate 11 and the inner four-corner bracket 21 are opposite to the outer four-corner bracket. 16 moves upward to realize the lifti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More