

Coordination control method and device for active front wheel steering and torque vector of electric automobile
A technology of active front wheel steering and torque vectoring, used in electric vehicles, motor control, control drive, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
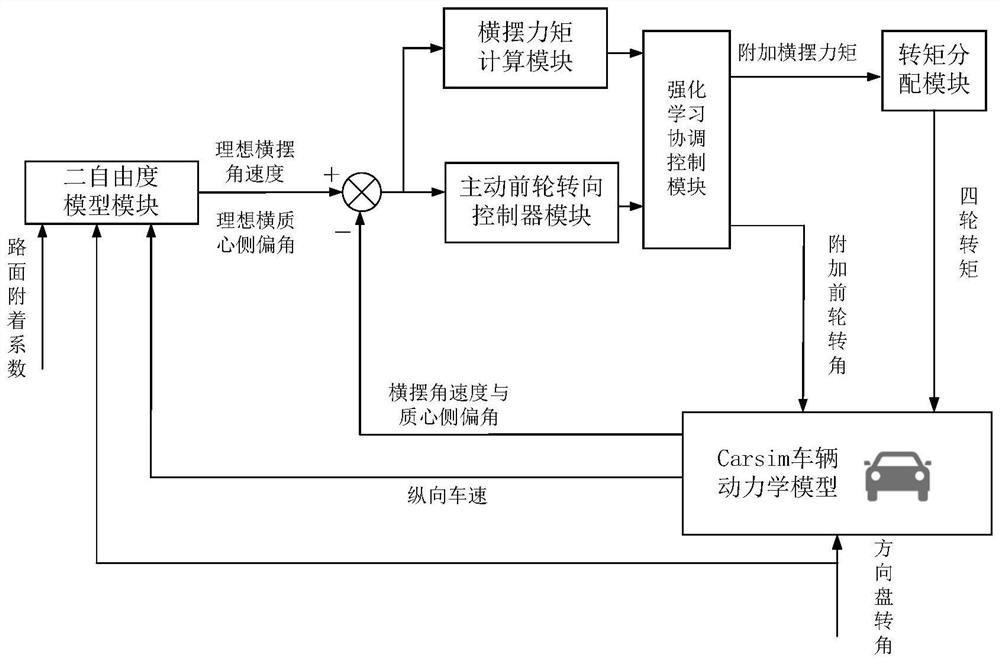
[0025] like figure 1 As shown in the figure, the coordinated control method of active front wheel steering and torque vectoring of electric vehicles includes the following steps:
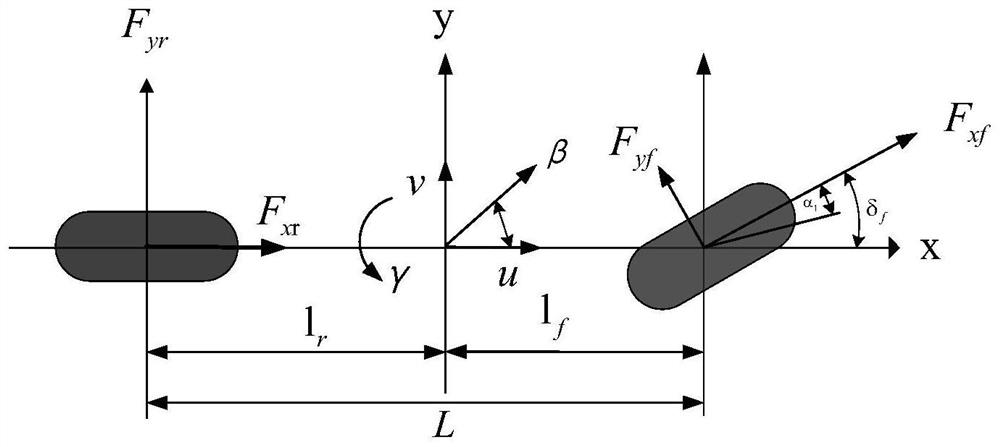
[0026] (1) Based on the single-track vehicle model, construct a two-degree-of-freedom vehicle model including two degrees of freedom of vehicle side sway and yaw;
[0027] (2) establishing an ideal reference model according to the two-degree-of-freedom vehicle model in step (1);
[0028] (3) According to the two-degree-of-freedom vehicle model of step (1), design an active front wheel steering controller;
[0029] (4) Design a torque vectoring controller, which includes calculating additional yaw moment and torque distribution;
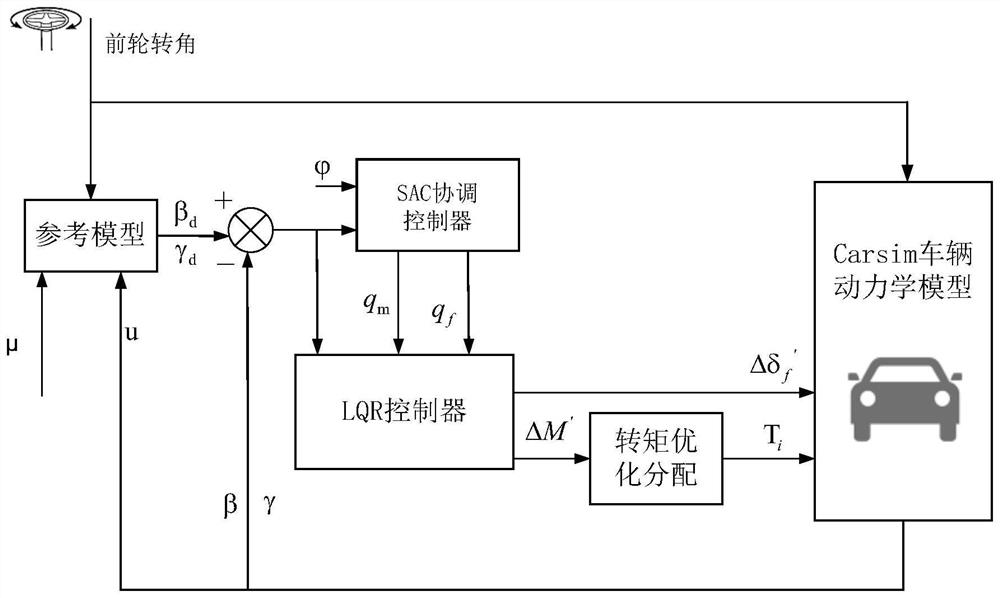
[0030] (5) Introduce a deep reinforcement learning controller to coordinate the output of the active front wheel steering and the torque vector controller.
[0031] The invention constructs a two-degree-of-freedom vehicle model including two degrees of freedom of the veh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More