

MEMS inertial navigation system calibration method
A calibration method and inertial navigation system technology, which are applied in radio wave measurement systems, satellite radio beacon positioning systems, instruments, etc., can solve the problems of high-precision turntable dependence, cumbersome turntable calibration process, etc., to improve test efficiency and save production. The effect of test cost and good calibration effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0038] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below with reference to the embodiments and the accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
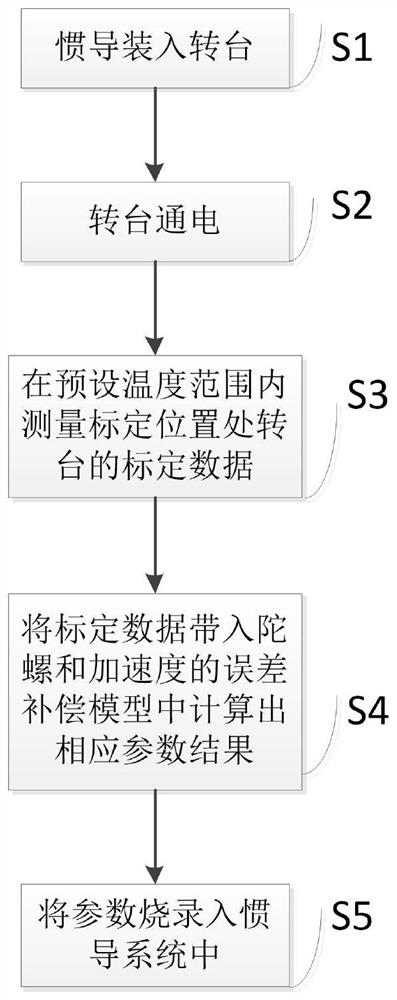
[0039] like figure 1 As shown, a method for calibrating a MEMS inertial navigation system includes the steps:
[0040] S1, the inertial navigation is loaded into the turntable; S2, the turntable is powered on; S3, the calibration data of the turntable at the calibration position is measured within the preset temperature range; in step S3, the preset temperature range is -40°C-60°C, and every 10°C is A node that measures temperature. A total of 11 temperature nodes are measured: -40°C, -30°C, -20°C, -10°C, 0°C, 10°C, 20°C, 30°C, 40°C, 50°C, and 60°C. At each temperature point, the X-axis refers to the sky and the ground, the Y-axis refers to the sky and the ground, the Z-axis refers to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More