Non-linear system adaptive event trigger control method and system
A nonlinear system, event-triggered technology, applied in adaptive control, comprehensive factory control, general control system, etc., can solve the problems of fast stability of difficult nonlinear systems, easy to be disturbed by external environment, input saturation of nonlinear systems, etc. Achieve the effect of avoiding Zeno behavior, suppressing external interference, and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
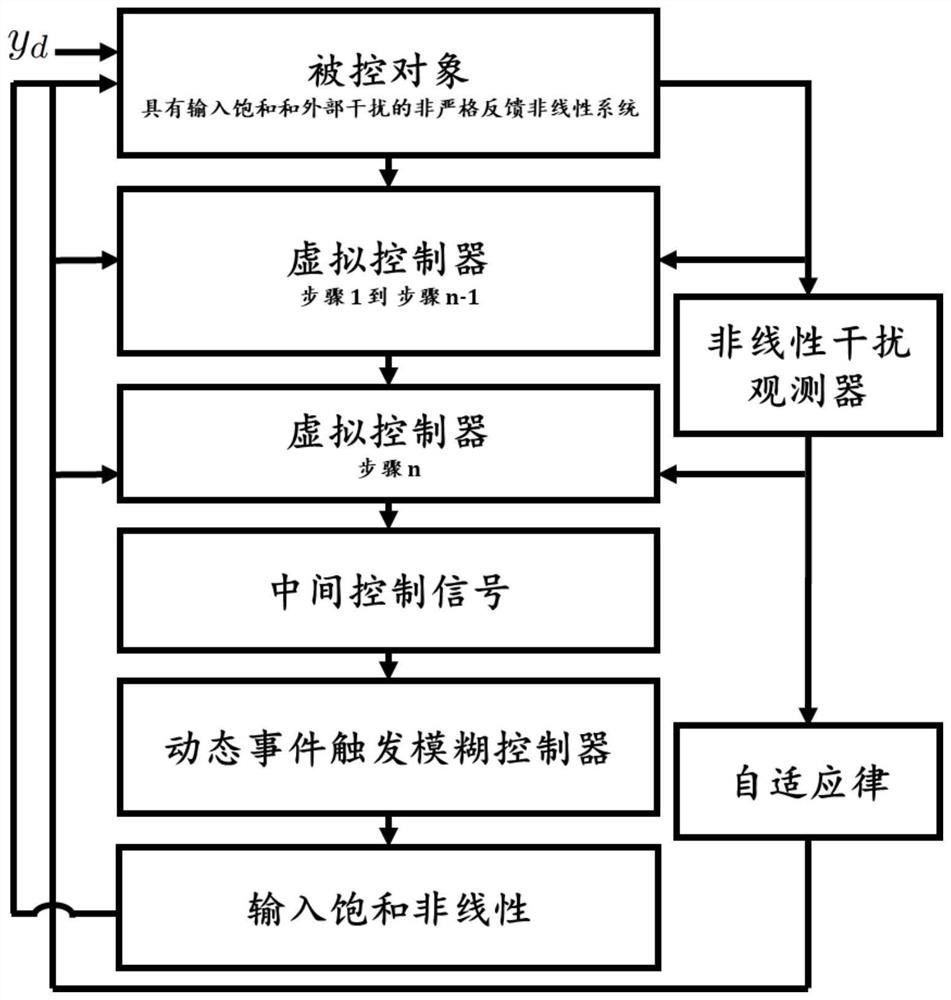
[0049] This embodiment provides a nonlinear system adaptive event-triggered control method, such as figure 1 shown, including the following steps:
[0050] Step 1: Obtain the reference signal y d and the controller output υ(0) at the initial moment, and obtain the nonlinear system control input u(υ(0)) at the initial moment.
[0051] Among them, the nonlinear system is a nonlinear system with input saturation and external disturbance. A dynamic model is established for the physical characteristics of a class of nonlinear systems with input saturation and external disturbances. The non-strict feedback nonlinear system with input saturation and external disturbances in this embodiment is as follows:
[0052]
[0053]
[0054] y=x 1 ,1≤i≤n-1
[0055] in, represents the state vector of the nonlinear system, x i represents a state component of the nonlinear system; means x i Derivative to time t; υ(t) represents controller output, t represents time; f i (x) and f n ...
Embodiment 2
[0114] This embodiment provides a nonlinear system adaptive event-triggered control system, which specifically includes the following modules:
[0115] a data acquisition module, configured to: acquire the reference signal and the controller output at the initial moment, and obtain the nonlinear system control input at the initial moment;
[0116] an auxiliary variable determination module, which is configured to: obtain a first auxiliary variable through the auxiliary system based on the reference signal, the controller output and the nonlinear system control input, and obtain the second auxiliary variable through coordinate transformation;
[0117] a disturbance term estimation module, configured to: obtain an estimated value of the disturbance term through the nonlinear disturbance observer based on the second auxiliary variable;
[0118] The controller output update module is configured to: acquire the dynamic signal in the dynamic event trigger mechanism, combine the firs...
Embodiment 3
[0123] This embodiment provides a computer-readable storage medium on which a computer program is stored, and when the program is executed by a processor, implements the steps in the adaptive event-triggered control method for a nonlinear system described in the first embodiment above .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More