

Semantic point cloud acquisition and semantic octree map construction method based on score-to-score
An acquisition method and semantic technology, applied in the field of artificial intelligence robots and computer vision, can solve problems such as errors and lack of semantic information in octree semantic maps, and achieve the effect of solving low practicability, simple and convenient implementation, and improving user experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be described in detail below with reference to the accompanying drawings and embodiments.
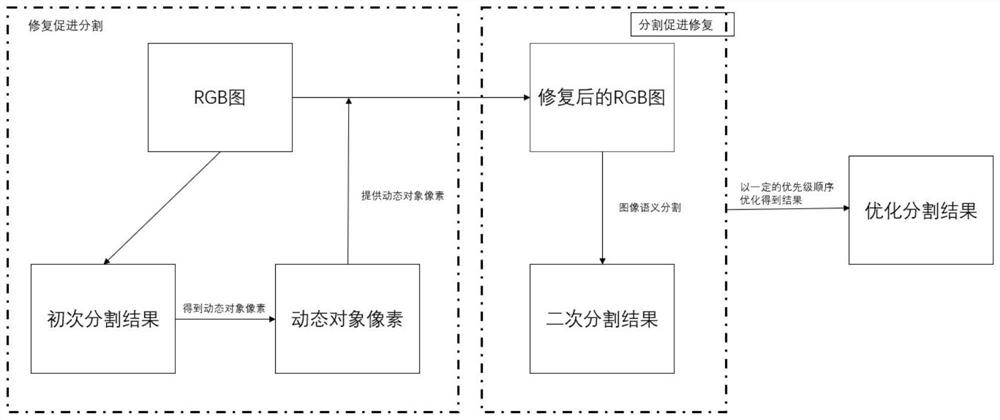
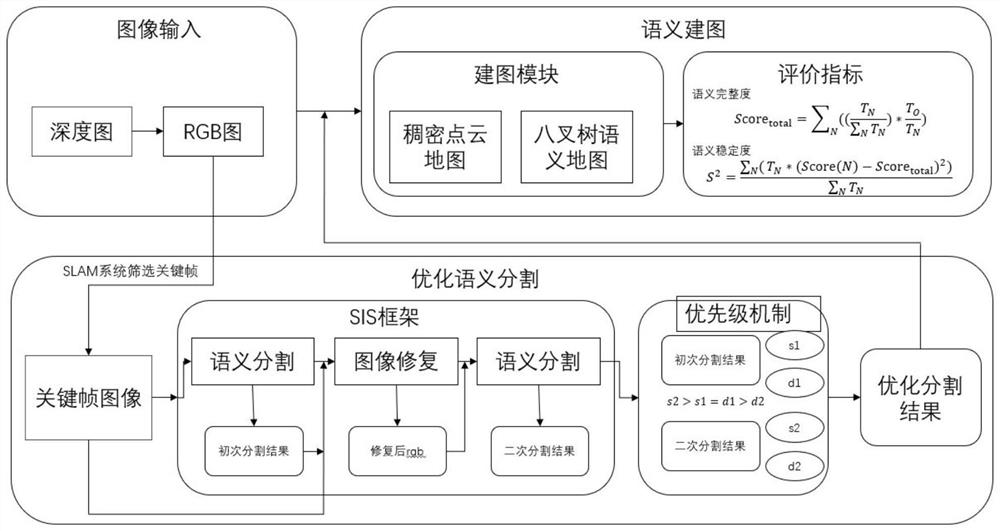
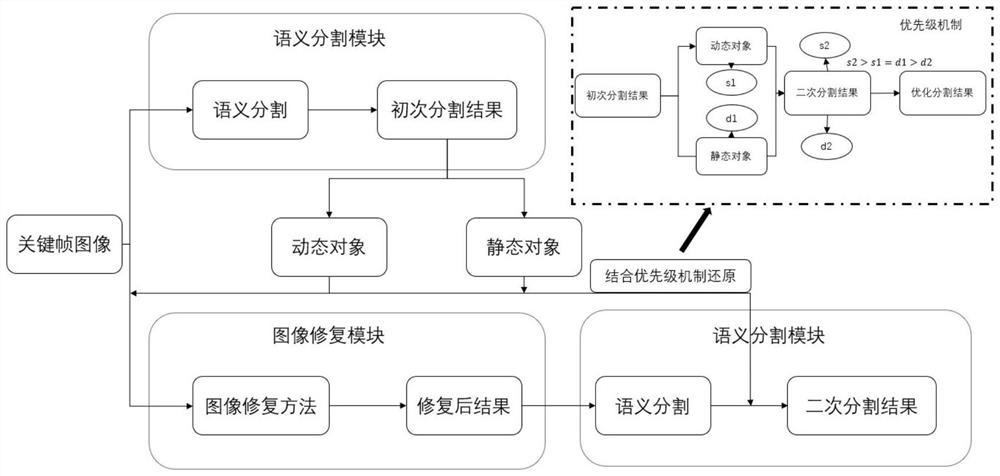
[0025] When the robot moves in the real scene, it will build a map through the visual SLAM system. Due to the existence of dynamic objects in the scene, it will block the static objects in the scene, resulting in incomplete or wrong semantic segmentation results of static objects in the scene, which in turn leads to semantic octrees. Incompleteness and errors of semantic information in maps. The present invention proposes that, on the premise that the visual SLAM system does not change the image segmentation method used, an image inpainting network and an identical image segmentation network are added in series, and the results of two image semantic segmentation are fully utilized to obtain real dynamic scenes. The optimized semantic segmentation results are combined with the octree semantic map building module of the visual S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More