

Variable magnetic force adsorbing unit for wall clamping robot
A wall-climbing robot, magnetic adsorption technology, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of increasing drive power consumption torque requirements, increasing motion resistance, motion impact, etc., to overcome adsorption capacity and mobility, Switch control is convenient and the effect of compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
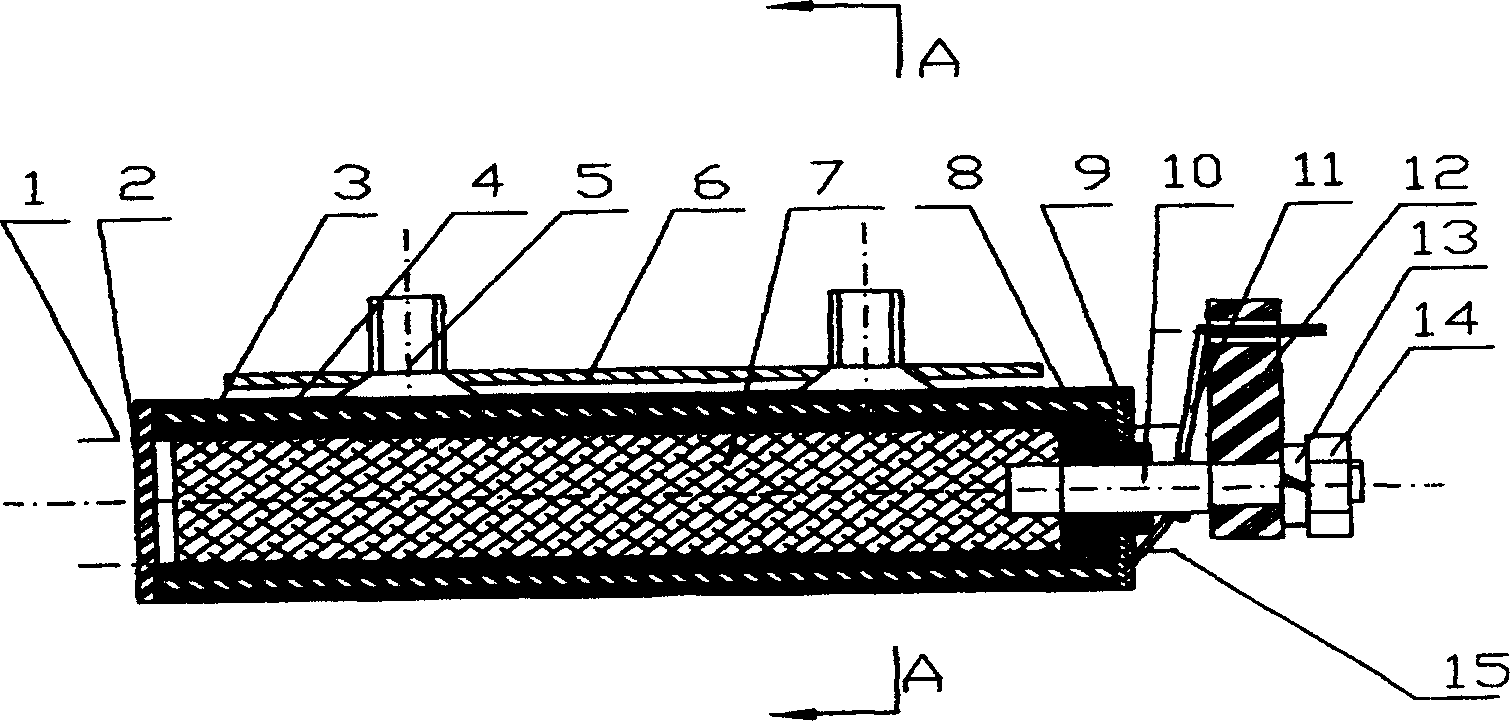
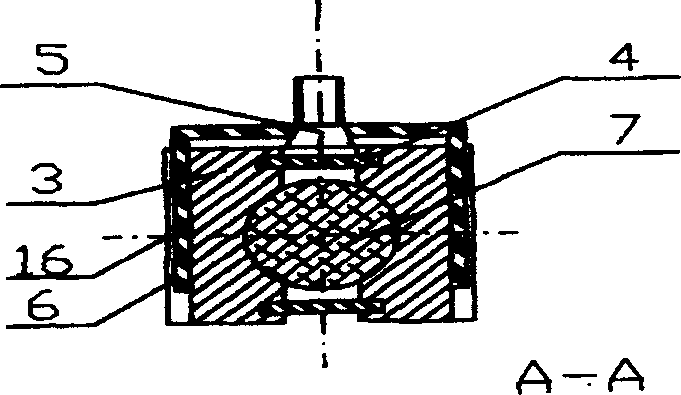
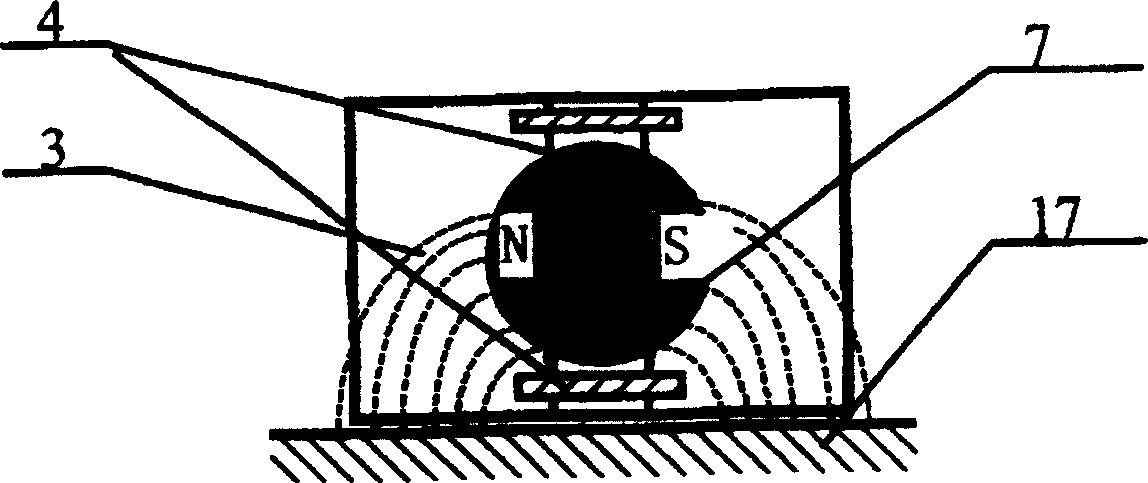
[0027] The variable magnetic force adsorption unit of the present invention is as attached figure 1 And attached figure 2 As shown, the permanent magnet variable magnetic force adsorption unit designed by the present invention includes three parts: the magnetic circuit part, the connecting part and the toggle-return mechanism. The adsorption magnetic circuit part is composed of a permanent magnet 7 , a yoke 3 and a spacer magnet 4 . The permanent magnet 7 is cylindrical and magnetized in the radial direction. The yoke is composed of two parts and arranged symmetrically. A spacer magnet 4 is placed in the middle. A through hole is opened in the center of the rectangular yoke 3. The permanent magnet is located in the central through hole formed by the yoke and the spacer magnet. The permanent magnet 7 can rotate freely in the hole. . Among them, the permanent magnet is made of neodymium-iron-boron (NdFeB) magnetic material with high coercive force, and the aging treatment pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More