

Four wheel electronic differential speed steering control system
A technology of steering control and electronic differential speed, which is applied in the direction of automatic steering control components, steering mechanisms, steering rods, etc., can solve the problems of increasing friction between the wheel and the ground, accelerating wheel wear, and noise, so as to prolong the service life and reduce the noise. The effect of small friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
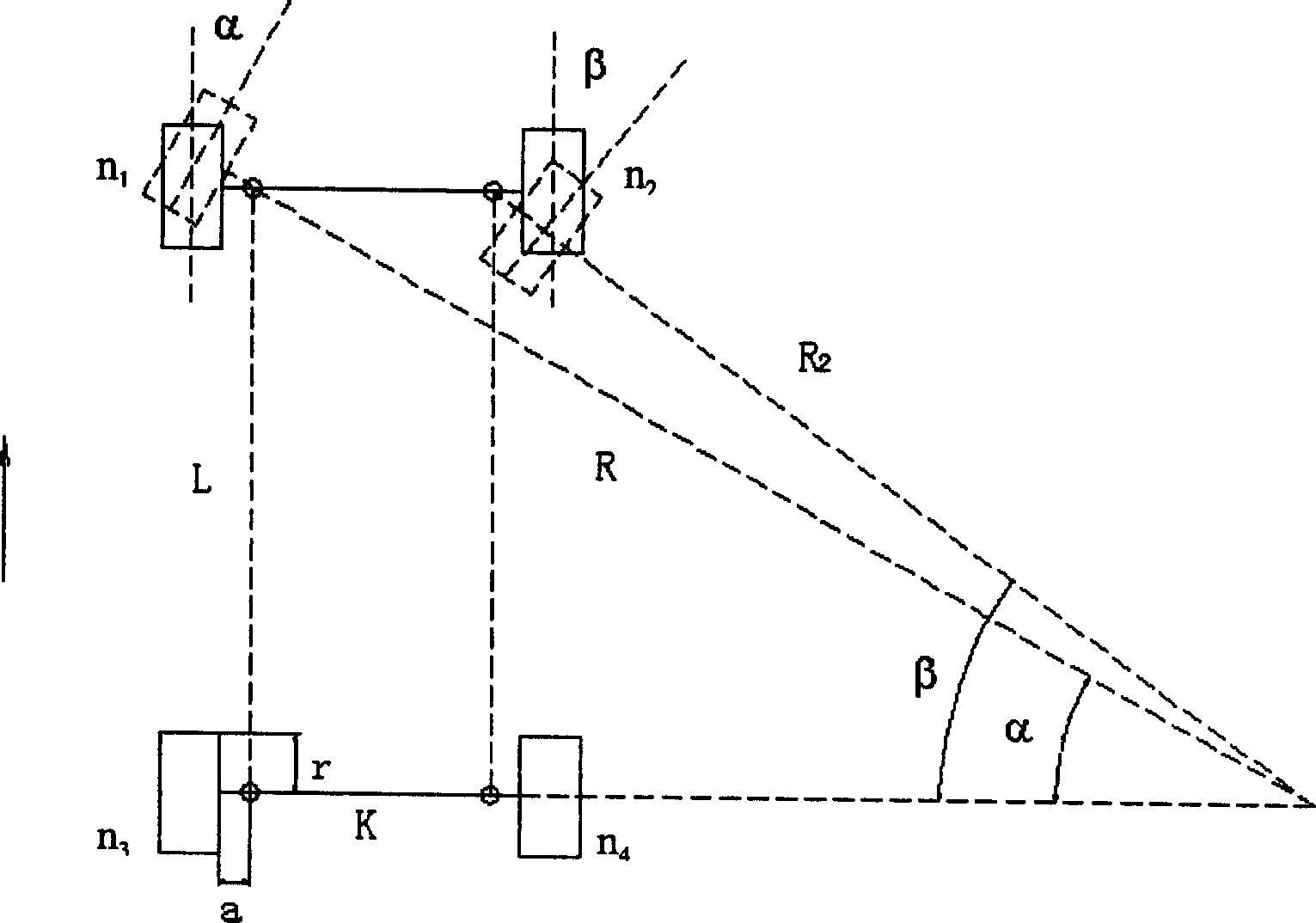
[0020] In order to ensure that the pure rolling state is always maintained between each wheel and the ground, such as figure 1 Taking the kinematics relationship of four-wheel drive and front two-wheel steering as an example, the general relational expression between the rotation speed of each wheel and the steering angle of the wheel is derived, so as to establish the relationship between the rotation speed of each wheel under different steering angle conditions, n1 is Calibration speed, the wheel is the outer front wheel, n2 indicates the rotational speed of the inner front wheel, n3 indicates the rotational speed of the outer rear wheel, and n4 indicates the rotational speed of the inner rear wheel.
[0021] Because during the rotation of the car, the rotation angular velocity of its four wheels should be equal, but the rotation speed is proportional to the radius of rotation of its circumference, so n2 / n1=R2 / R1, so according to figure 1 As shown, the following formula is o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More