

Plug-and-play mechanical arm system based on distributive control
A distributed control, plug-and-play technology, applied in the direction of manipulators, claw arms, manufacturing tools, etc., can solve the problems that the precise control of the manipulator cannot be realized, the transmission speed cannot meet the transmission speed, etc., and achieve the promotion of technological development and reliability High, the effect of improving research efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
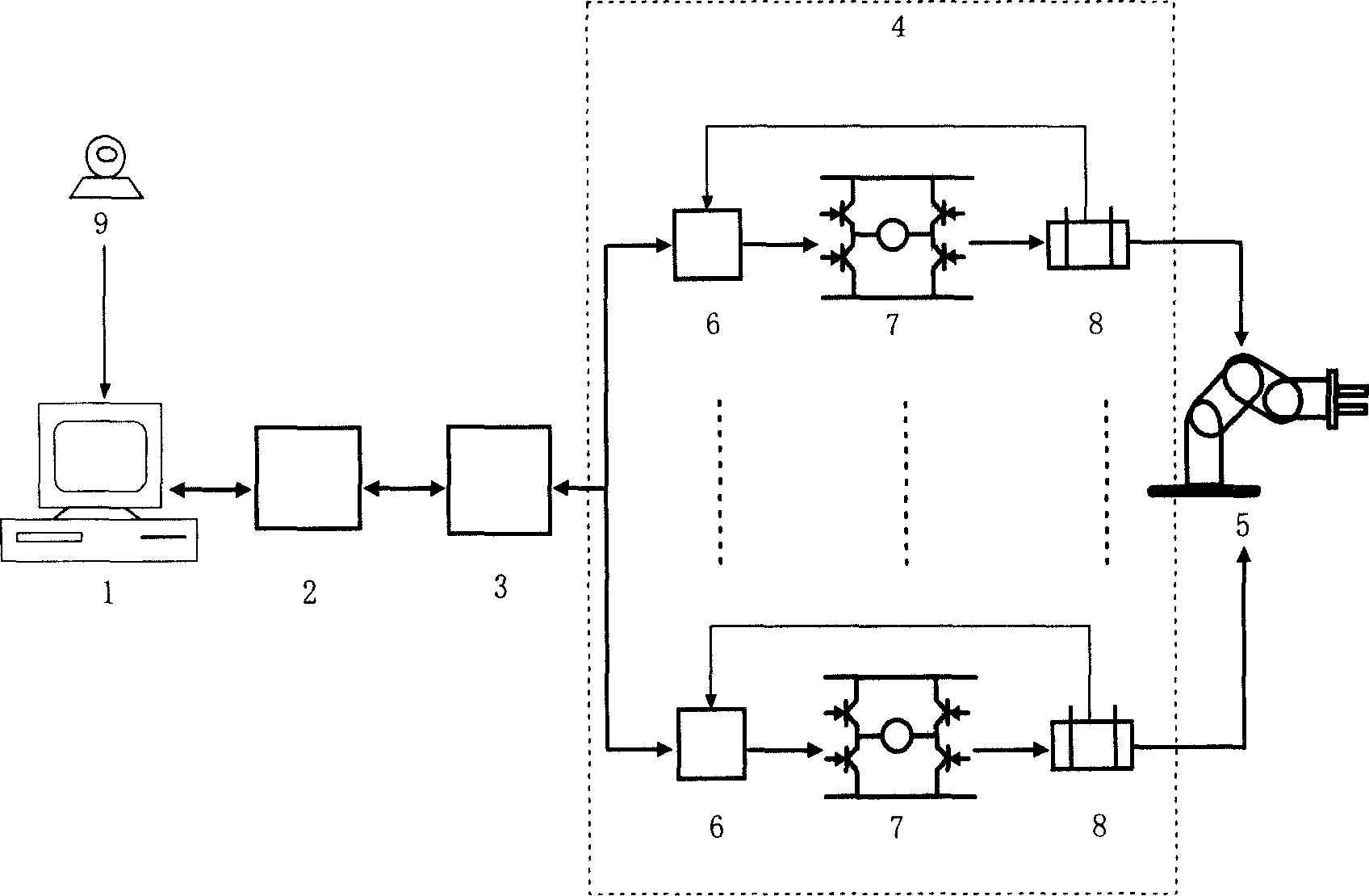
[0017] Such as figure 1 As shown, the present invention includes: a host 1 , a USB interface module 2 , a central controller 3 , an internal distributed control system 4 and a robot arm body 5 . The host 1 is connected to the USB interface module 2 through a USB cable, and the central controller 3 is located between the USB interface module 2 and the internal distributed control system 4. These two parts are connected to the central controller 3 through a parallel bus, and the internal distributed The control system 4 is composed of multiple subsystems with the same function connected in parallel, wherein each subsystem includes a PID controller 6, a DC motor driver 7 and a DC motor 8 with feedback, and the internal distributed control system 4 directly passes through The control line is connected with the mechanical arm body 5 .
[0018] In the internal distributed control system 4, the input interfaces of the PID controllers 6 of all subsystems are connected in parallel and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More