

Movable manipulator system
A technology for mobile manipulators and manipulators, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of finding, moving fast, limiting the viewing angle range and function of the visual system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
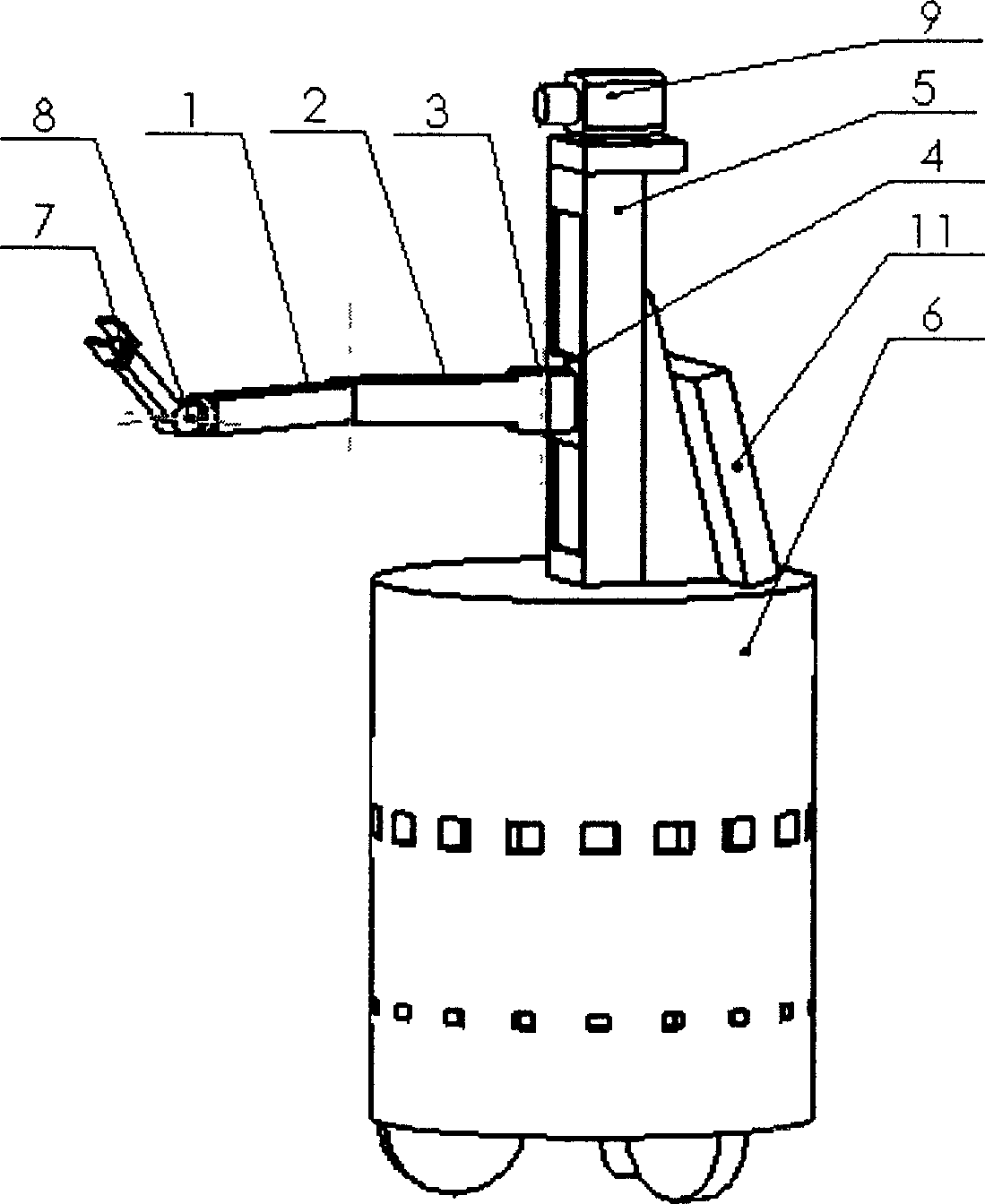
[0011] The three degrees of freedom of the mobile platform refer to its three motion forms of front and rear, left and right, and rotation on the plane, which can realize all-round movement on the plane, especially in a narrow space, and can move freely. Therefore, it can ensure that the robot arm Operate in a favorable orientation. In addition to wheels, motors, drivers and drive power, the mobile platform also includes ultrasonic sensors and infrared sensors, etc., which can be used to achieve preliminary positioning of the mobile platform.
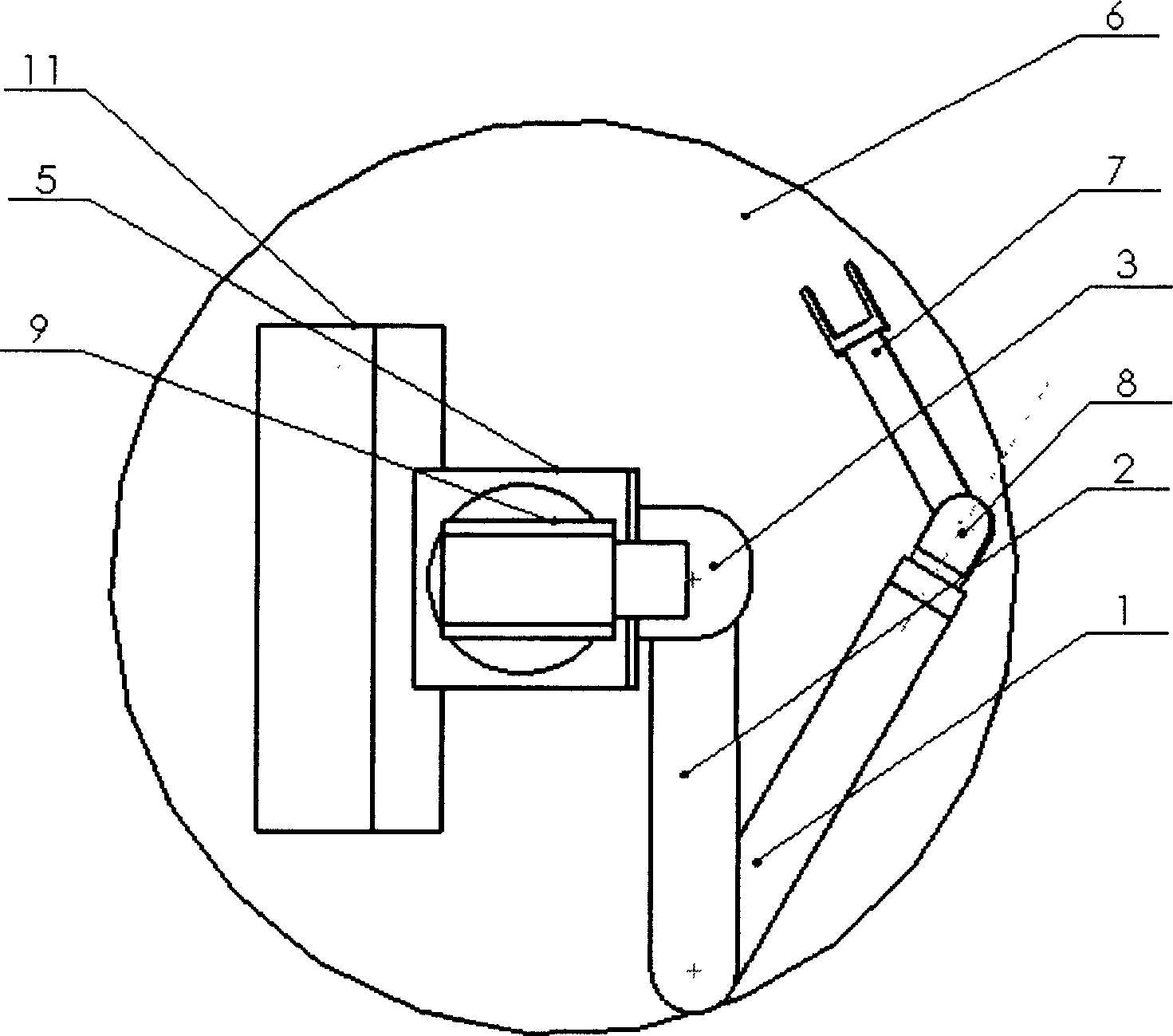
[0012] The manipulator consists of the following parts: torso, shoulder, upper arm, forearm, wrist, and hand. And the joints connecting each part, including 1 moving joint, such as the up and down movement of the slider on the linear guide rail (trunk), and 4 rotating joints such as shoulder joint, elbow joint, wrist rotation joint and wrist swing joint, a total of 5 degrees of freedom. Through the coordinated movement of each joint, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More