

Controller
A technology for controllers and control calculations, applied in electric controllers, adaptive controls, controllers with specific characteristics, etc., can solve the problem of reducing sensitivity to parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0054] The controller of the present invention essentially has a mechanism for bringing the characteristics of the overall system, including the processing and control parts, close to a response that theoretically does not cause overshoot to occur, eg, that of a first order lag system.
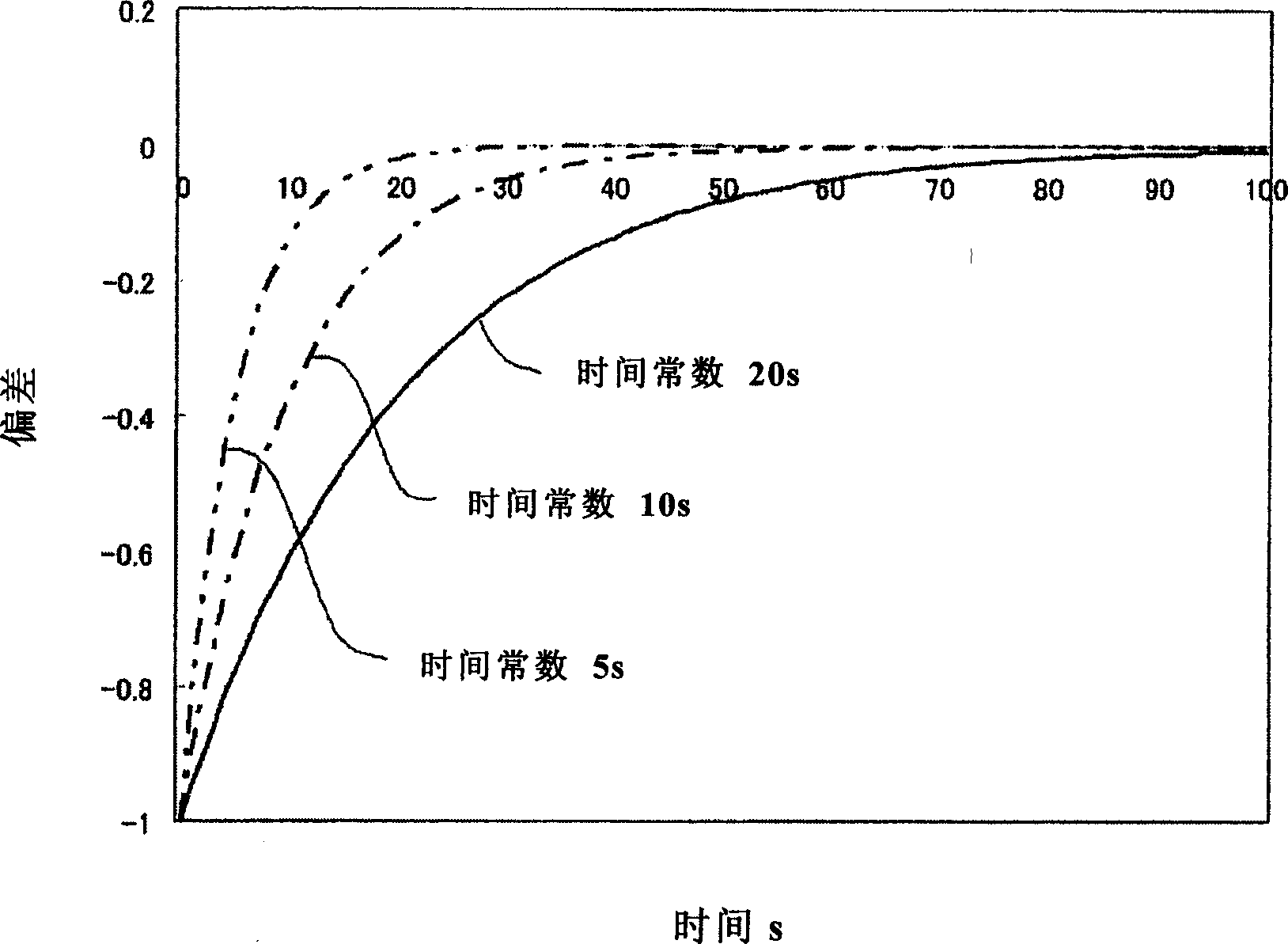
[0055] exist figure 1 As shown in the trend graph of the step response from the initial value of the deviation "-1" to the first-order lag with the deviation "0", the step response of the first-order lag does not cause overshooting. That is, in the step response of the first-order lag, for example, when the time constant is 20 seconds, the time constant is 10 seconds, and the time constant is 5 seconds, if the time s is taken in the direction of the horizontal axis and the deviation is taken in the direction of the vertical axis, The step responses each asymptotically approach "0" with the passage of time, and overshoot beyond the deviation "0" does not occur.
[0056] To express the response ...
no. 2 example
[0083] In the following, it will be discussed with reference to illustrations that, in the case where the process is nonlinear, PID control is performed by the controller including the desired set point path generating section 11 of the first embodiment.
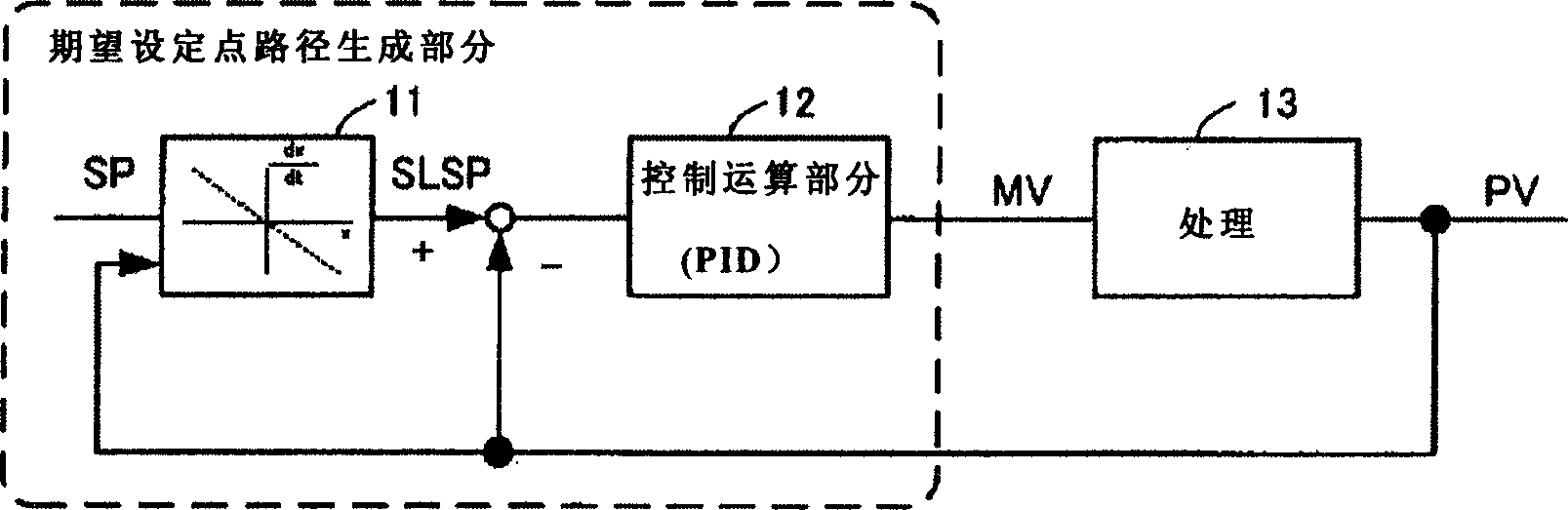
[0084] Figure 9 is a partial block diagram of the controller, showing a case where the control using the desired setpoint path generating section 11 of the embodiment is applied to the nonlinear processing 13A.
[0085] In the embodiment, the desired set point path generating section 11 is located in front of the control operation section 12, and calculates the desired set point path SLSP based on the desired set point SP and the rate of change of the process value PV, so that the desired set point path SLSP Continuously provided to the PID controller 12.
[0086] Therefore, referring to the previous Figure 5 and Figure 6 Describing the desired setpoint path SLSP, the response of the process value PV from process 13A b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More