

Underwater robot three-dimensional path visual tracking method
An underwater robot, path tracking technology, applied in three-dimensional position/channel control and other directions, can solve the problems of ignoring the underactuated AUV steering characteristics, single target output action, affecting tracking accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment 1
[0077] according to figure 1 As shown, the application provides a three-dimensional path visualization tracking method for an underwater robot, comprising the following steps:
[0078] A three-dimensional path visualization tracking method for an underwater robot, comprising the following steps:
[0079] Step 1: Establish the earth coordinate system, carrier coordinate system and curved coordinate system, and establish the six-degree-of-freedom model of the underwater robot according to the coordinate system;
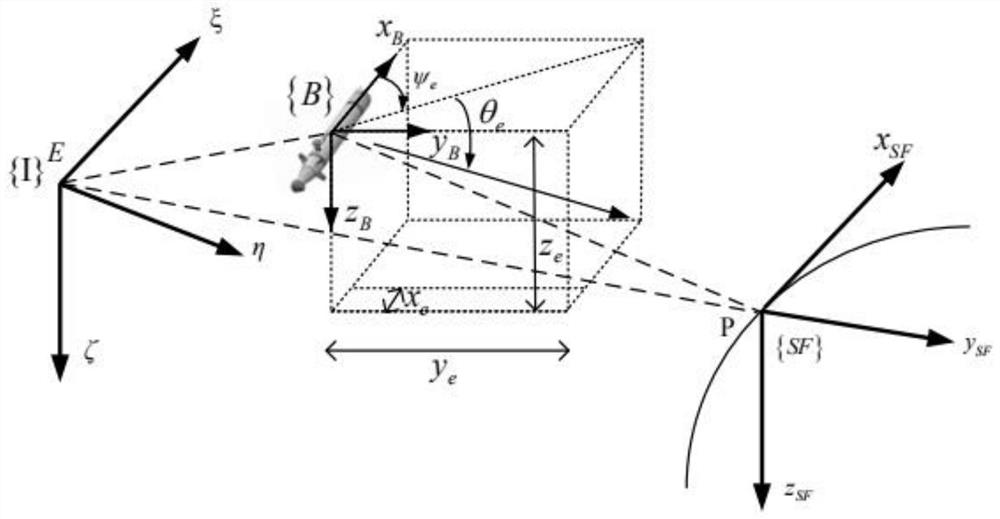
[0080] The step 1 is specifically:
[0081] Such as figure 2 As shown, step 1.1: establish the earth coordinate system {I}, the earth coordinate system is a certain point on the sea level, the positive direction of the ξ axis in the earth coordinate system is the same as the main course of the underwater robot AUV, and the ζ axis points to the center of the earth , ξ-axis, η-axis and ζ-axis form a right-handed coordinate system;
[0082] Establish the carrier coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More