

System and method for nonlinear dynamic control based on soft computing with discrete constraints
A technology of control systems and controllers, applied in general control systems, control/regulation systems, calculations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
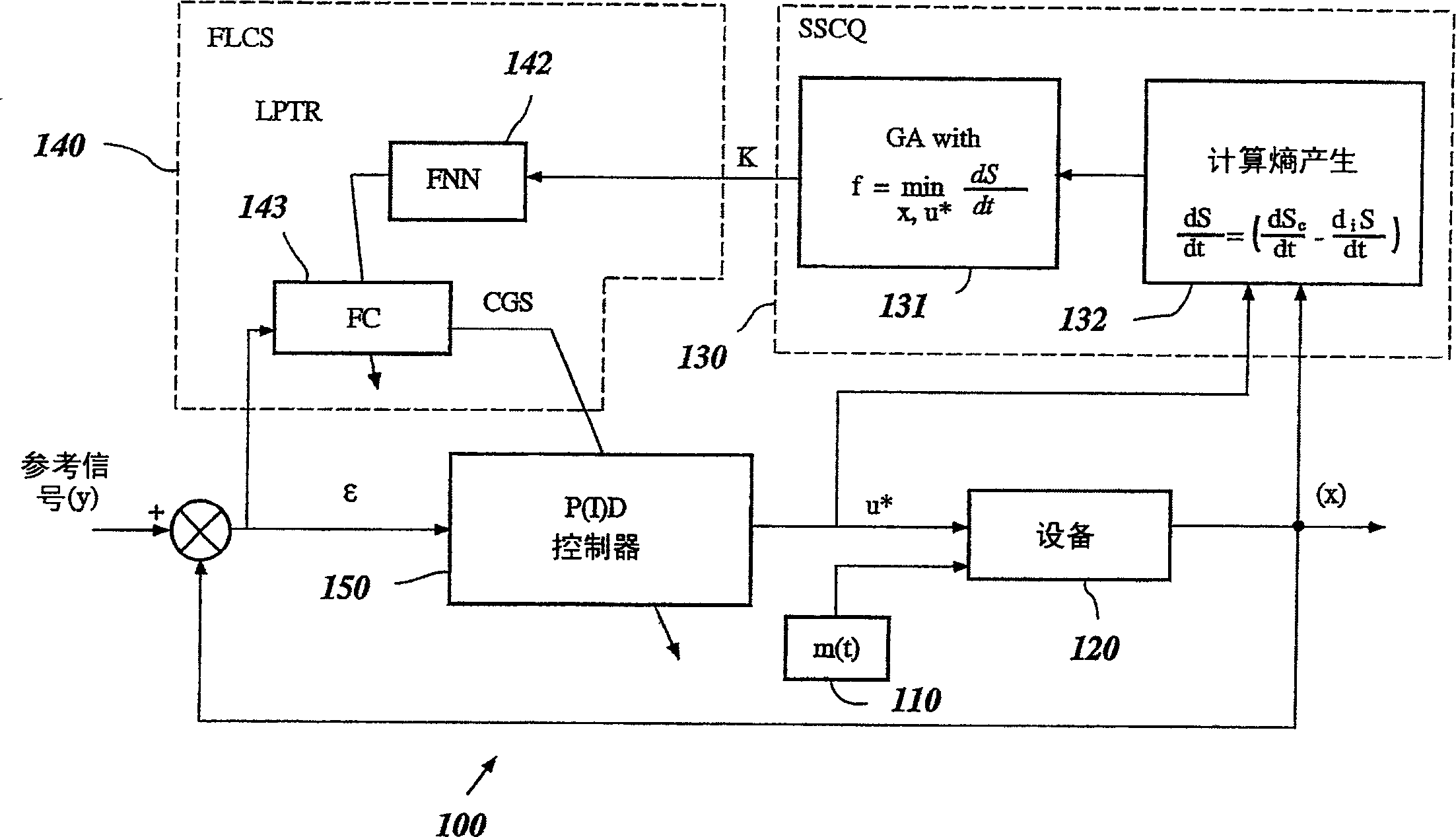
[0060] figure 1 is a block diagram of a control system 100 for controlling equipment based on soft computing. Within the controller 100 a reference signal y is provided to a first input of an adder 105 . The output of the adder 105 is an error signal ε, which is provided to the input of the fuzzy controller (FC) 143 and the input of the proportional-integral-derivative (PID) controller 150 . The output of the PID controller 150 is the control signal u * , the control signal is provided to the control input of the device 120 and to the first input of the entropy calculation module 132 . Disturbance m(t) 110 is also provided to the input of device 120 . The output of the device 120 is the response x, which is provided to a second input of the entropy calculation module 132 and to a second input of the adder 105 . The second input of adder 105 is negated such that the output of adder 105 (the error signal) is the value of the first input minus the value of the second input. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More