

Robot teaching apparatus
A teaching device and robot technology, which is applied in the direction of instruments, manipulators, simulators, etc., can solve the problems of collision between the robot and the operator of the surrounding objects, no teaching robot, and a lot of time spent, so as to reduce the burden and protect the object , reduce the effect of wrong operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Embodiments of the present invention will be described below with reference to the drawings.
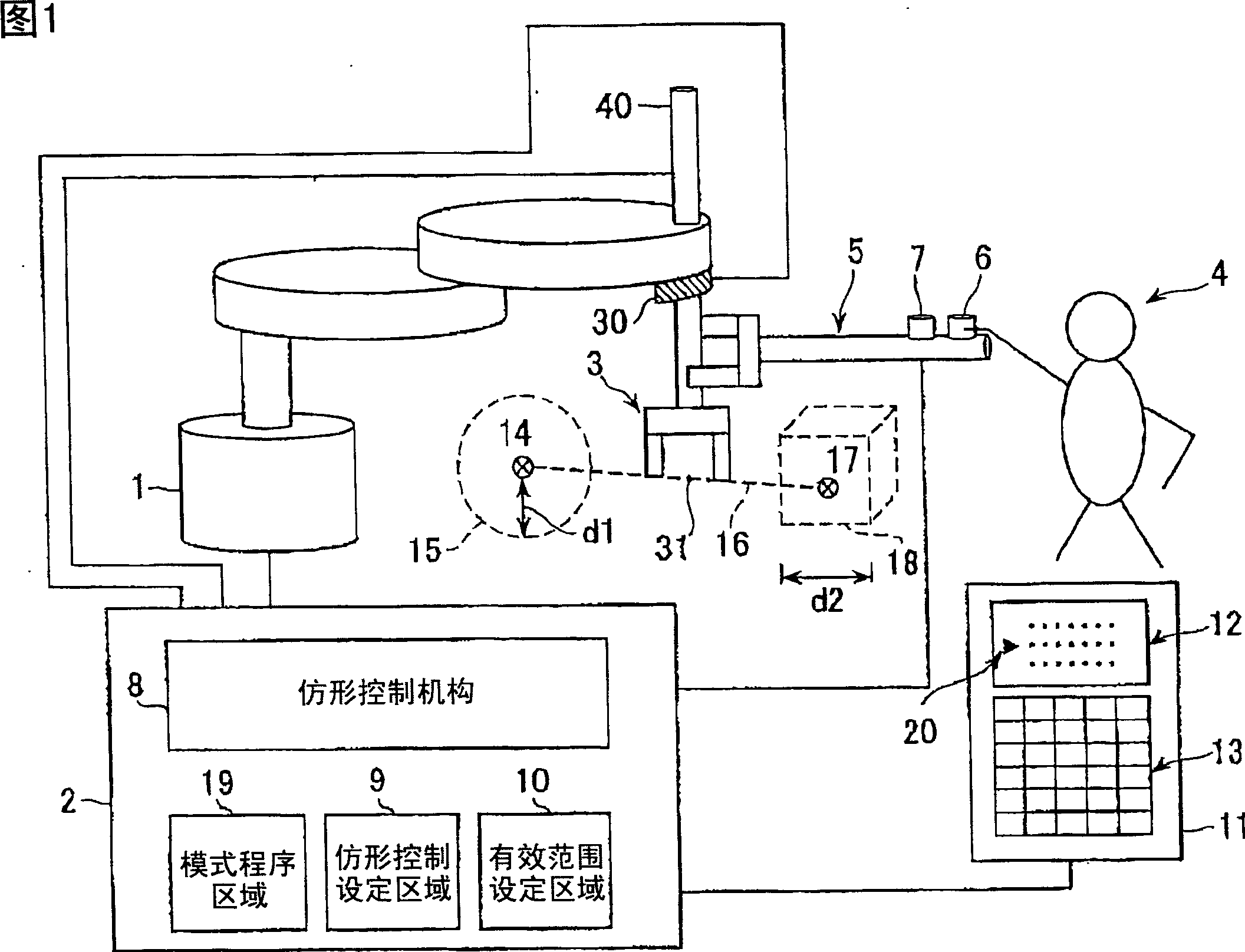
[0022] FIG. 1 is a diagram illustrating an outline of a teaching device according to an embodiment of the present invention. In FIG. 1, reference numeral 1 denotes a robot that is manually operated by profiling control,
[0023] Reference numeral 4 denotes an operator who manually operates and teaches the robot 1 . The robot 1 is controlled by a robot control device 2 connected to the robot 1 .
[0024] A tool 3 (here, a hand) is installed at the front end of the arm of the robot 1, and a point 31 of the front end of the tool is set to represent a point at the position of the robot. The tool tip point 31 represents the position or posture of the tool 3 . Near the front end point of the arm of the robot 1, a detachable handle 5 is installed, which is a handle for manual operation by the operator 4 to apply external force (parallel force or rotational momentum) to the robot 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More