

Adaptive motion selection method used for robot on line hand eye calibration
A technology of hand-eye calibration and robot hand, which is applied in the fields of visual servo and tactile perception, robot 3D vision measurement, and adaptive motion selection. Achieve the effect of improving calibration accuracy and increasing the number of calibrations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] In order to better explain the technical solution of the present invention, a further detailed description will be made below in conjunction with the accompanying drawings and embodiments.
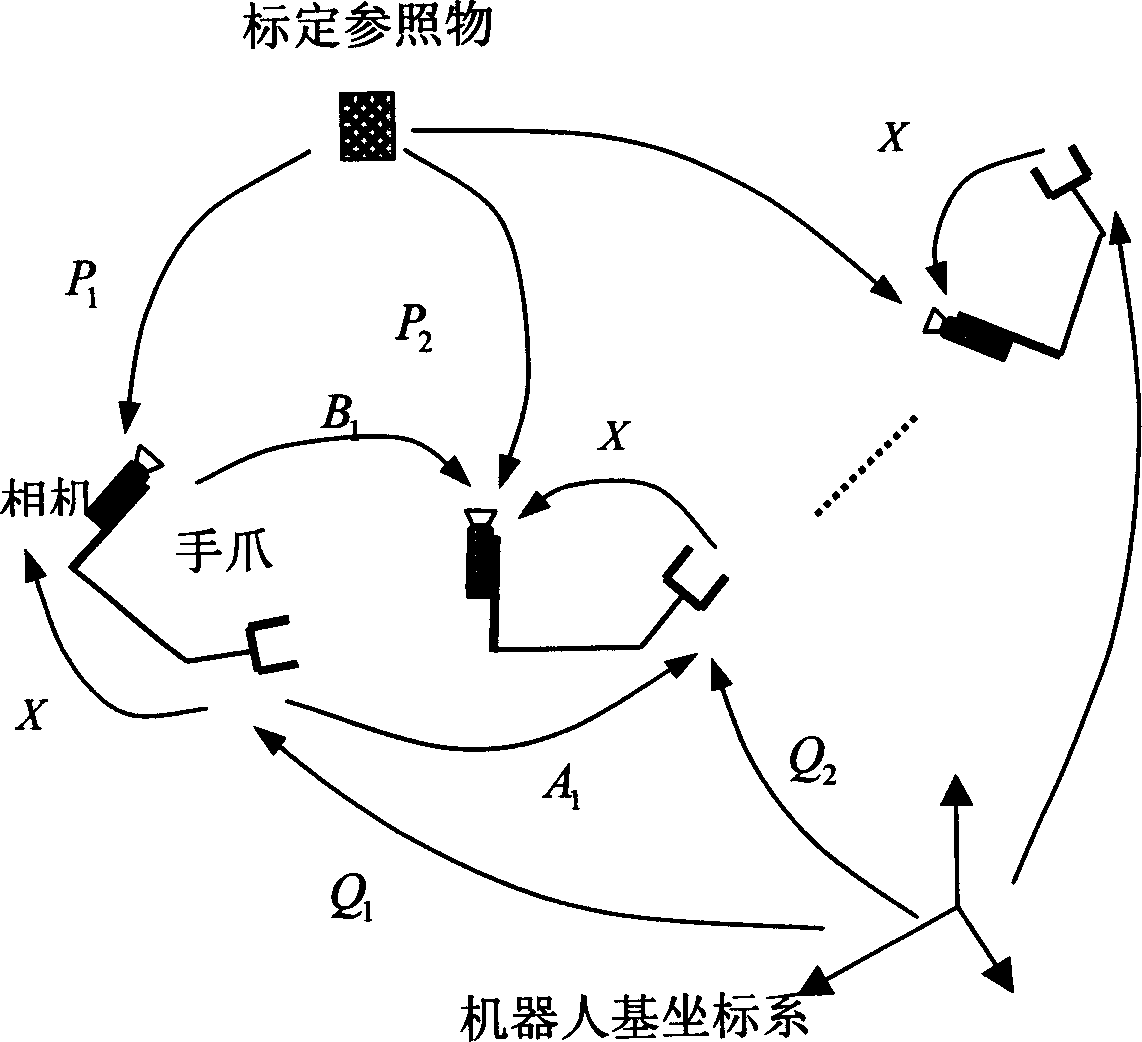
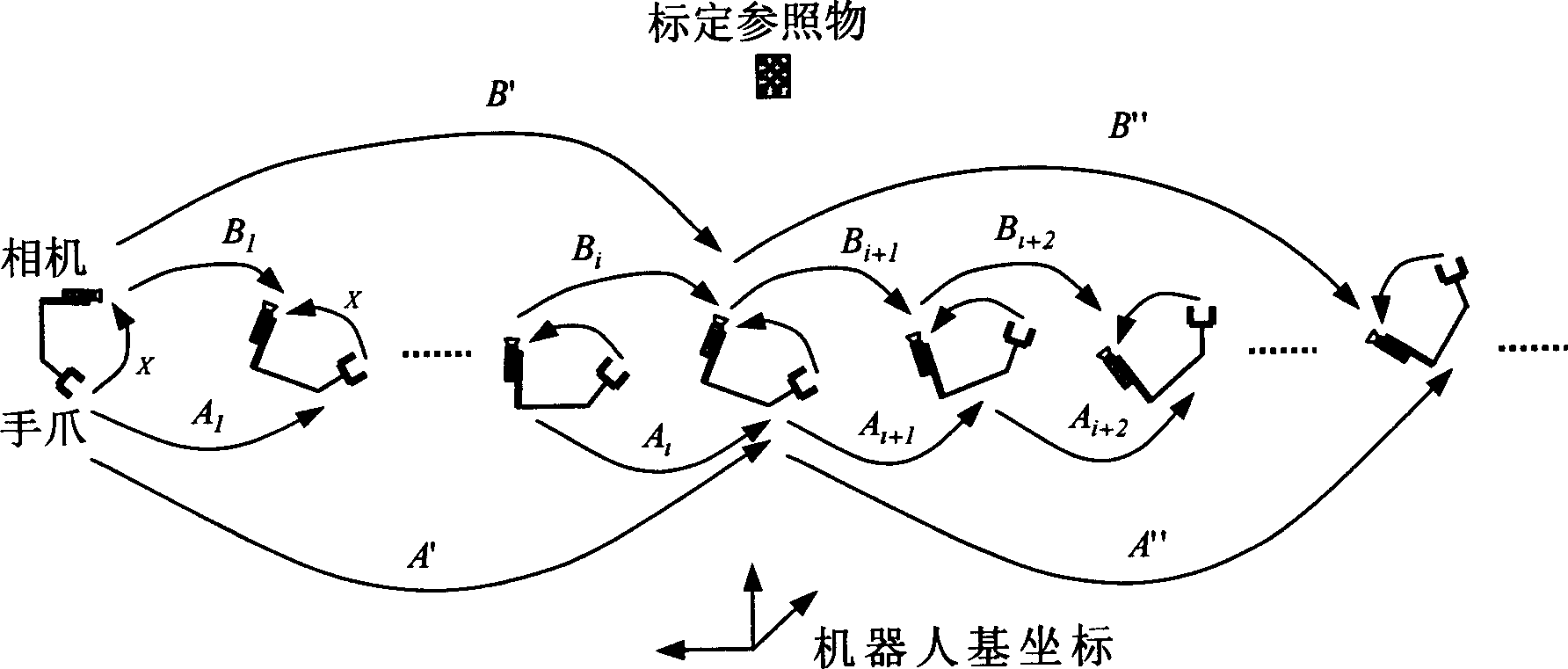
[0018] 1. Use the sine value of the angle between the rotation axes of every two movements in the first five movements of the robot gripper, the average value of the rotation angle of each movement and the modulus of the translation component of each movement to set the three parameters of the movement selection. thresholds: sin(α), β, d. Let the homogeneous matrix of the i-th (i is a natural number) sampled camera and hand gestures be P i , Q i , X is the homogeneous matrix of the hand-eye transformation relation to be solved.
[0019] ( sin ( α ) , β , d ) = 1 5 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More