

Five-freedom parallel robot mechanism with three translational dimensions and two rotational dimensions
A technology of three-dimensional translation and degrees of freedom, which is applied in the direction of manipulators, program-controlled manipulators, metal processing machinery parts, etc., can solve the problems of not many five-degree-of-freedom parallel mechanisms, error accumulation of rods, and low end precision, so as to reduce thermal effects , strong standardization, and reduced difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] In order to better understand the present invention, the present invention will be further described below in conjunction with the accompanying drawings.
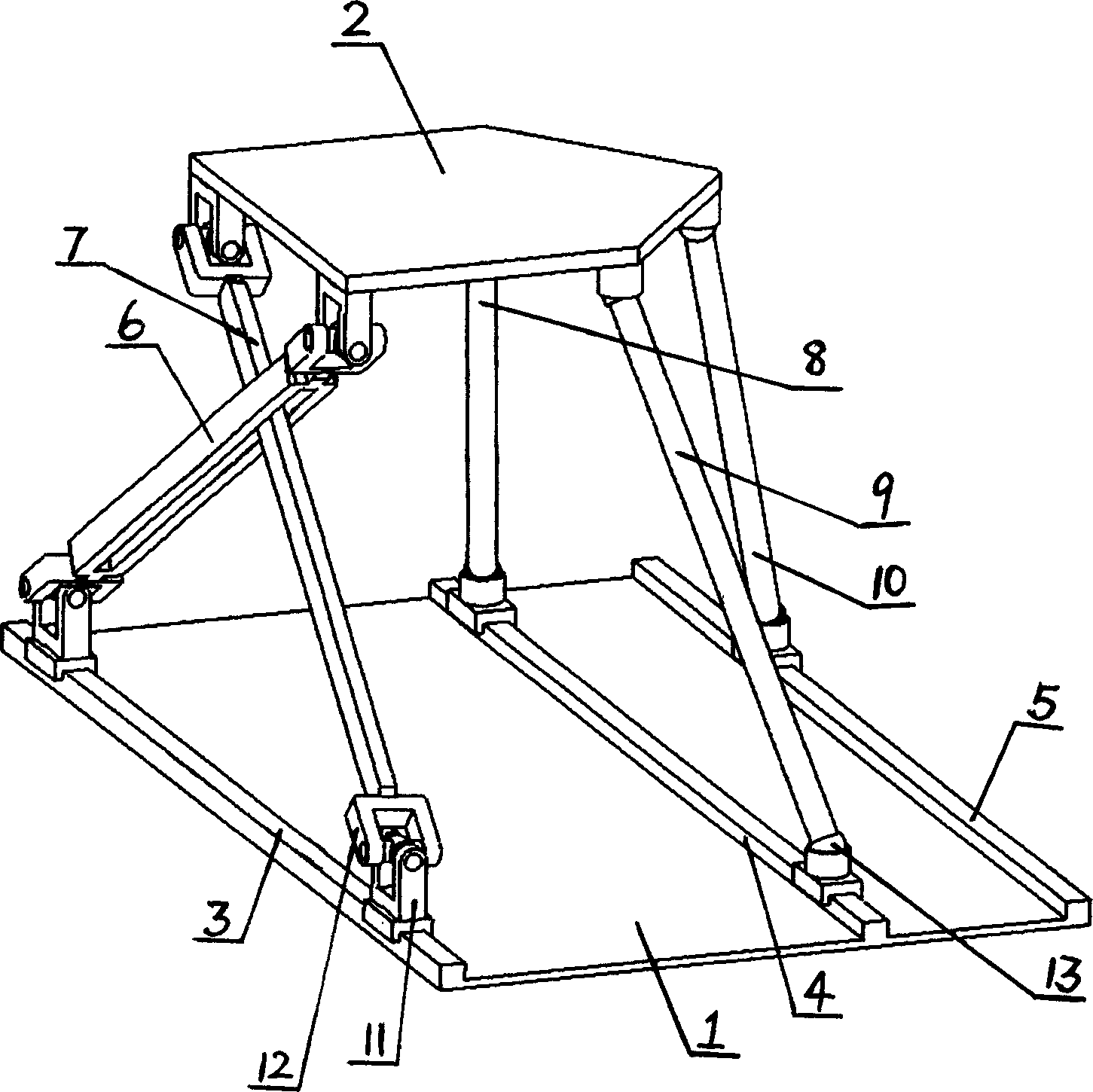
[0022] Such as figure 1 As shown, the five-degree-of-freedom parallel robot mechanism with three-dimensional translation and two-dimensional rotation of the present invention includes a static platform 1, a dynamic platform 2, a branch connecting the static platform 1 and the dynamic platform 2, and the dynamic platform 2 passes through five branches 6, 7 . Arranged crosswise and connected with guide rail 4; branch 10 is connected with guide rail 5; branch 6 and branch 7 each include a moving pair 11, two Hooke hinges 12 and a branch rod, and one end of branch 6 and branch 7 respectively passes through Hooke The hinge 12 is connected to the moving platform 2, and the other end is connected to the static platform 1 through a compound kinematic pair composed of a moving pair 11 and a Hooke hinge 12; branches 8, 9, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More