Robot controller
A control device and robot technology, applied in program control, general control system, control/regulation system, etc., can solve the problems of waste of manipulators and longer cycle time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0018] Hereinafter, the best mode for carrying out the present invention will be described with reference to the drawings.
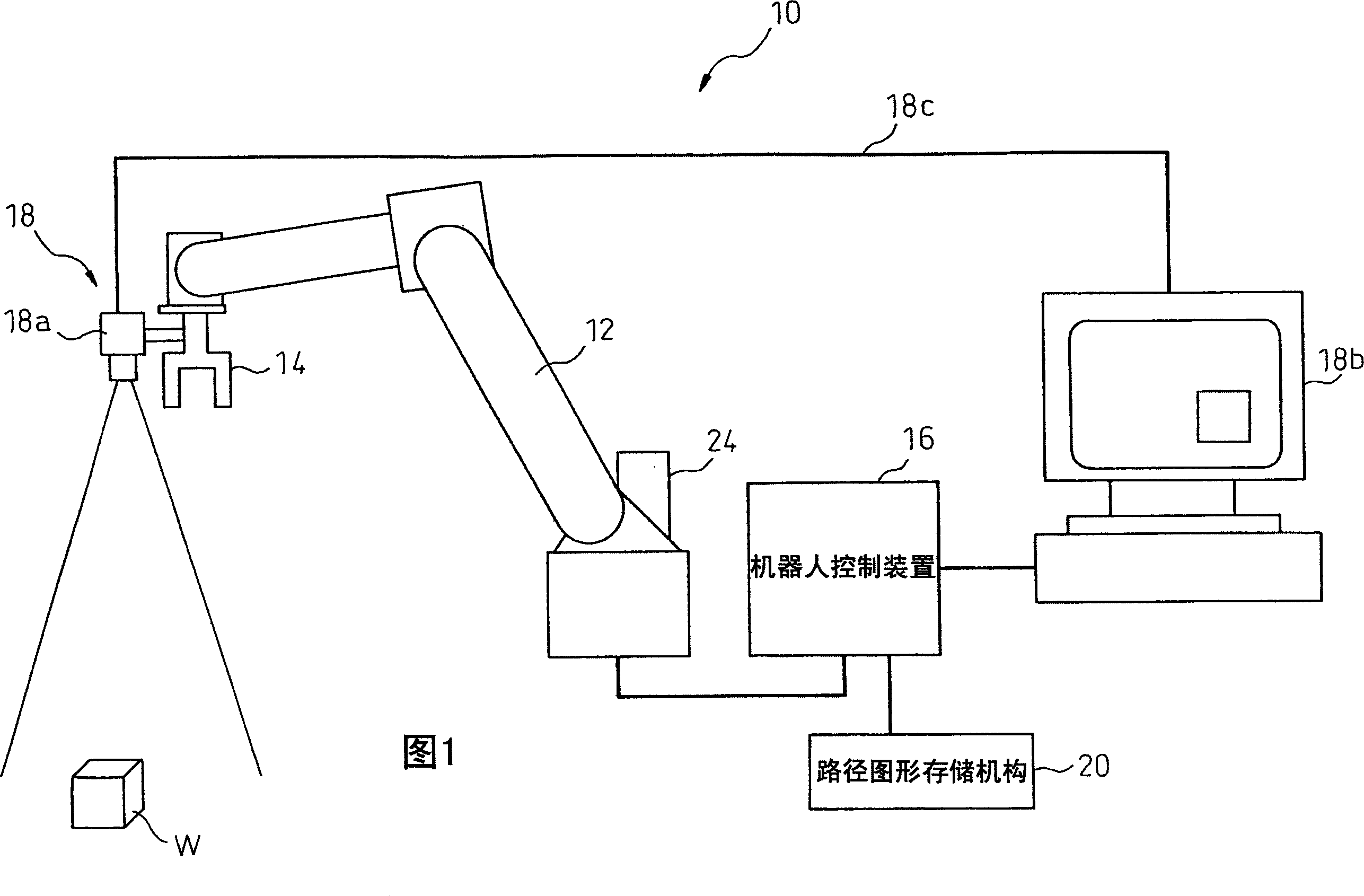
[0019] First, an overall configuration of a robot system 10 using a robot control device 16 of the present invention will be described with reference to FIG. 1 . The robot 10 system has: a robot arm 12; a manipulator 14 installed at the front end of the robot arm 12; a robot control device 16 for controlling the actions of the robot arm 12 and the manipulator 14; a visual sensor 18 for detecting the position of the workpiece W; and a path graph for storing The path pattern storage mechanism 20 makes the manipulator 14 close to the workpiece W placed on the workpiece placement table 22 such as a conveyor or a workbench, holds the workpiece W with the manipulator 14, and then transports the workpiece W to another place.
[0020] The robot arm 12 is of a known type, and is configured to be able to move the manipulator 14 to a predetermined position in respo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More