

Parallel robot with fluid-driven artificial muscle
An artificial muscle, fluid-driven technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problem of not using flexible artificial muscles to drive parallel robots.
Inactive Publication Date: 2010-09-29
JIANGNAN UNIV
View PDF4 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0002] Before the present invention, in prior art, for parallel robot, existing parallel robot all adopts rigid structure or flexible bar / arm, does not adopt the artificial muscle drive that has flexibility (can be bent and twisted). parallel robot
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
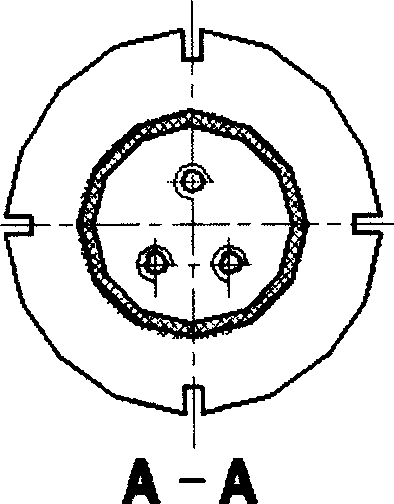
[0018] Below in conjunction with embodiment 1 of the invention, the operating principle and working process of parallel robot are illustrated:
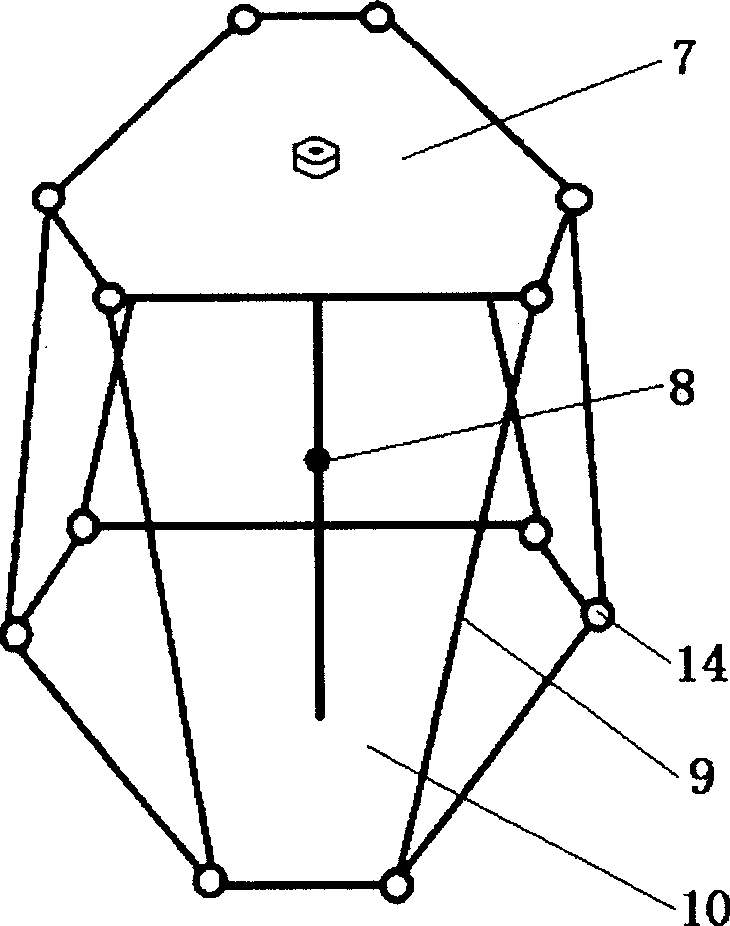
[0019] The three spaced artificial muscles 9 enter the pressure fluid at the same time, and the other three spaced artificial muscles 9 are squeezed to discharge the fluid, so that the working platform 7 rotates counterclockwise around the vertical spherical universal joint 8 axis; any adjacent two The artificial muscles 9 enter the pressure fluid at the same time, and the rest of the artificial muscles 9 are squeezed to discharge the fluid, which makes the working platform 7 rotate around the horizontal axis determined by the spherical universal joint 8 .
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
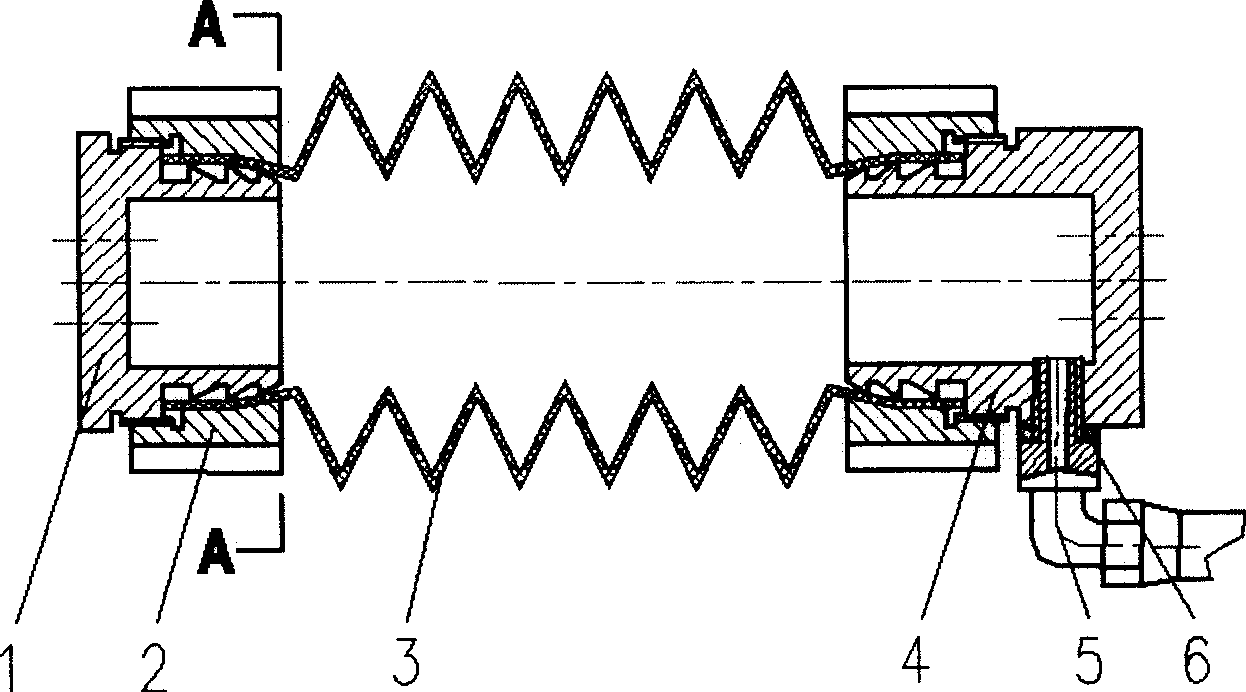
The invention relates to a parallel robot which uses liquid to drive the artificial muscle, belonging to the application technique of robot, machine, and machine tool. Said inventive parallel robot is driven by artificial muscle whose elastic-wave case can be aerated as the power of muscle and the aerated elastic-wave case can be bended and distorted, therefore, said artificial muscle has flexibility. The structure I is similar to the 6-SPS parallel robot; the moving connector is driven by artificial muscle; a ball universal connector is connected on the center of circumcircle between base platform and workbench to form the parallel robot with three rotary freedom degrees; the structure II is similar to 3-PTT parallel robot, while the axial center line of symmetry distributed artificial muscle and the axial center line of ball universal connector in the center are arranged in one plane; the moving connection is driven by artificial muscle; the ball universal connector is vertically connected on the center of circle of round base platform and round workbench to form the parallel with two rotary freedom degrees.
Description
Technical field: [0001] The invention relates to a parallel robot with fluid-driven artificial muscles. The parallel robot can be used as various joints such as wrists and ankles of humanoid robots, base parts and special flexible couplings of flexible working heads of machine tools, as The actuator and flexible mechanical structure of automation equipment belong to the application technical field of robots, machines and machine tools. Background technique: [0002] Before the present invention, in prior art, for parallel robot, existing parallel robot all adopts rigid structure or flexible bar / arm, does not adopt the artificial muscle that has flexibility (can be bent and twisted) to drive. Parallel robots. The base part and the special flexible coupling of the flexible working head (such as the polishing head) have not adopted the structure of compliant artificial muscles (as an air spring with adjustable inner cavity pressure, thereby adjusting the rigidity of the system...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): B25J13/00B25J9/08
Inventor章军须文波吕兵
OwnerJIANGNAN UNIV