

Flexible gripper with two fingers
A gripper and two-finger spirit technology, applied in the field of two-finger dexterous grippers, can solve the problems of difficult measurement of clamping force, large influence, damage to the surface of objects, etc., and achieve the effect of reasonable device layout and flexible clamping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described in detail below in conjunction with the accompanying drawings.
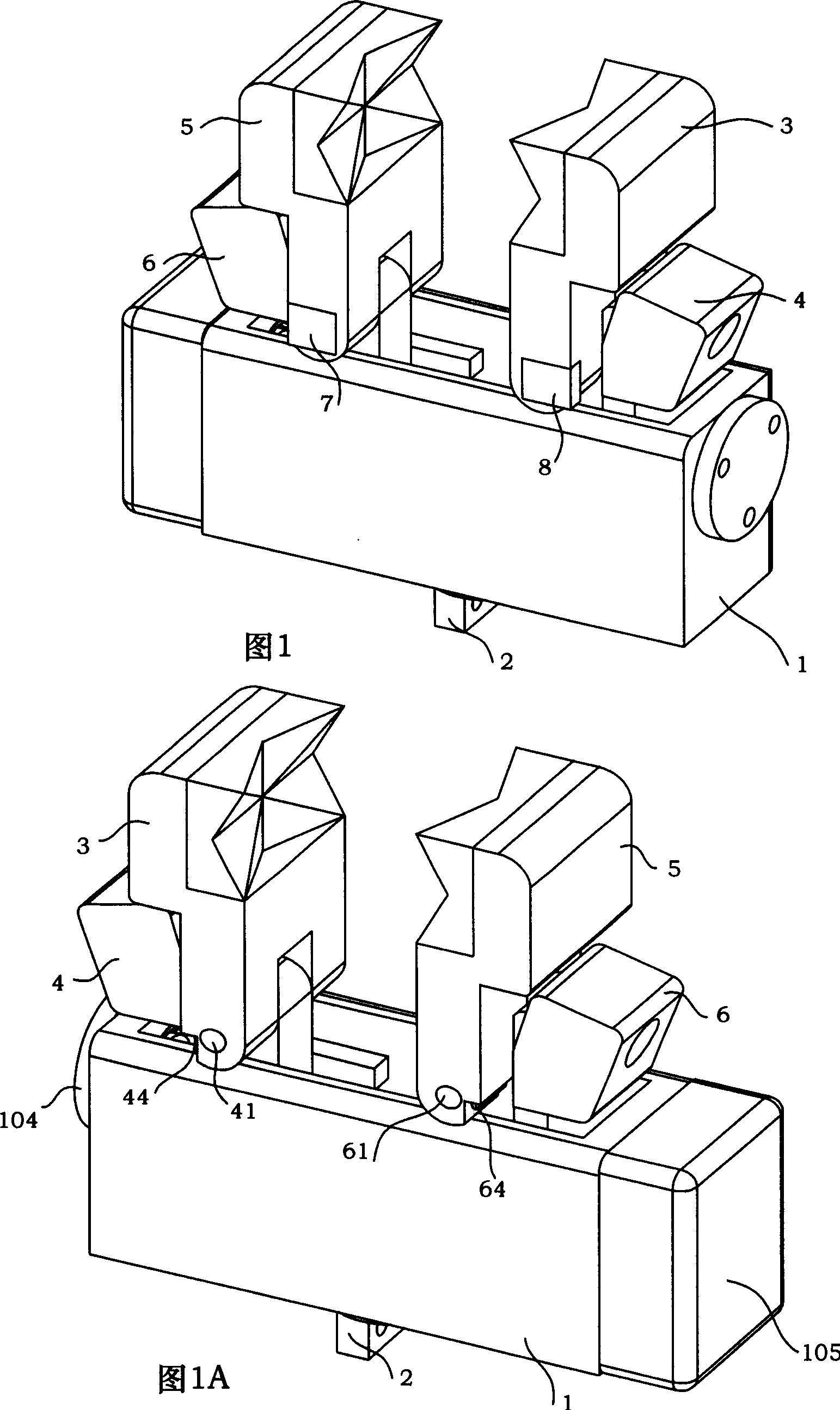
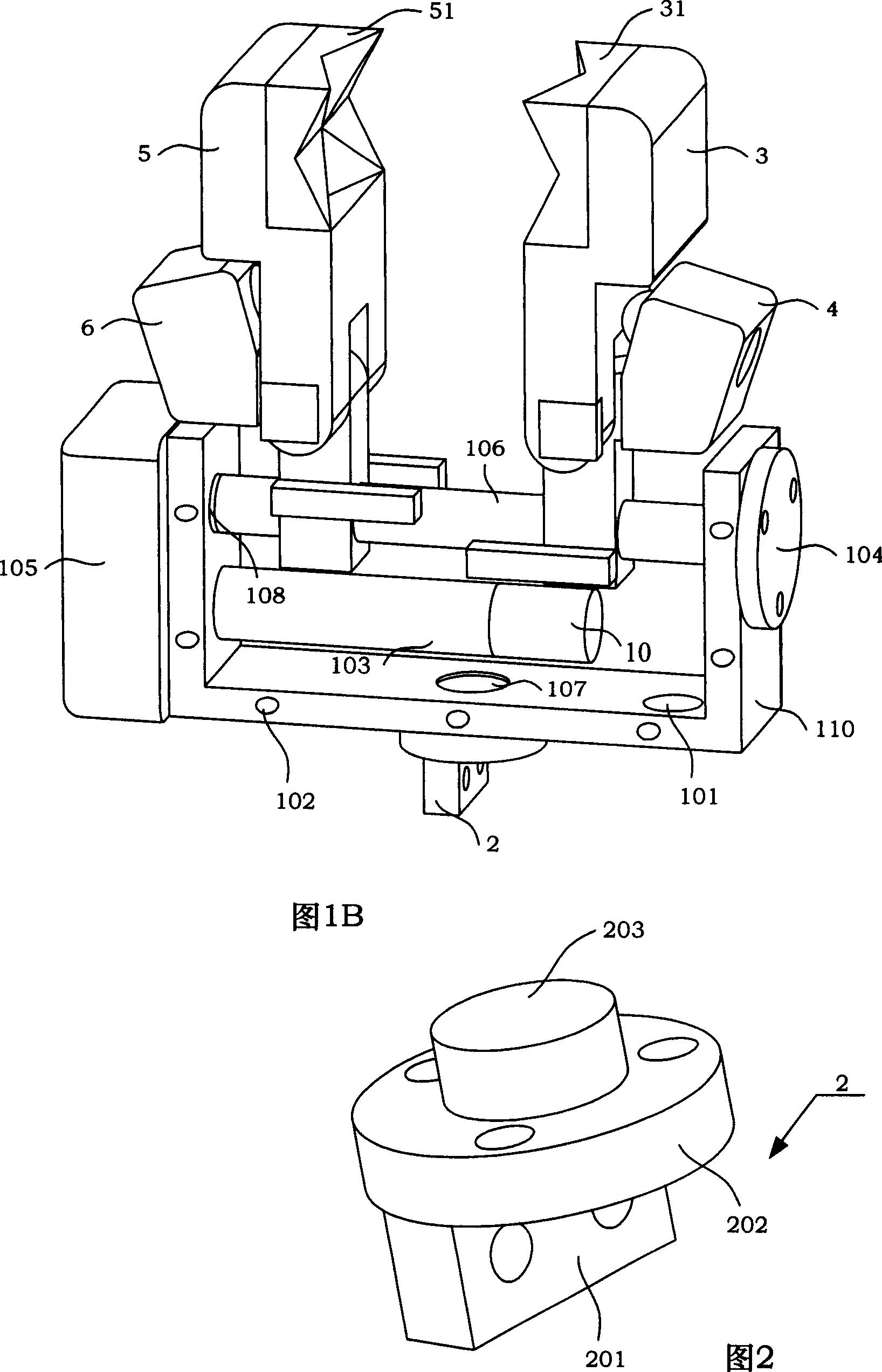
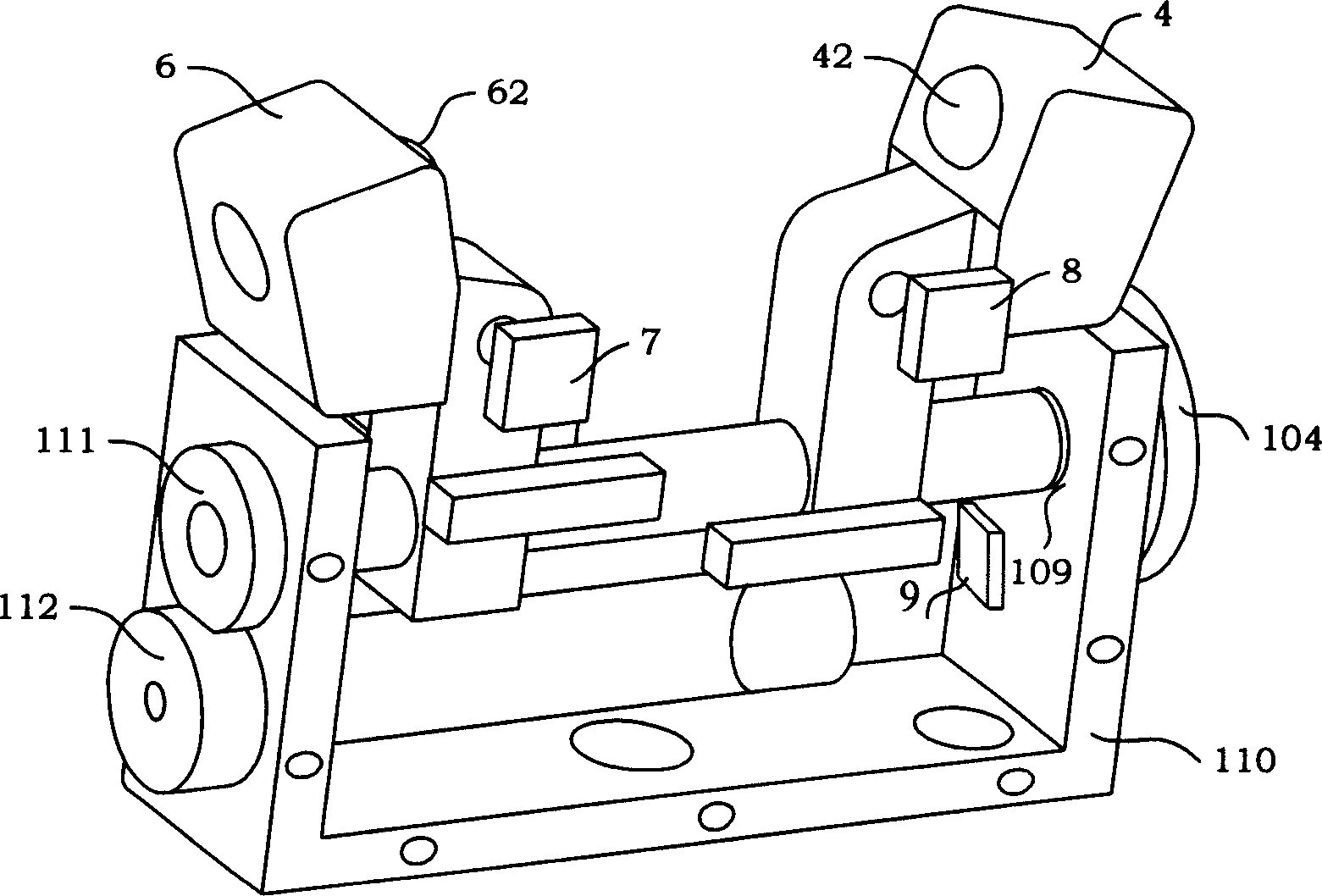
[0040] Please refer to the accompanying drawings, the two-finger smart gripper of the present invention is composed of a mechanical body, a driving mechanism, a transmission mechanism and a driving device. The driving mechanism, the transmission mechanism and the driving device are installed on the finger seat 1 of the mechanical body. The body is composed of a finger base 1 , a connecting piece 2 , a right finger assembly 3 , a right sliding assembly 4 , a left finger assembly 5 and a left sliding assembly 6 . The left finger potentiometer 7 (for measuring the angle information of the left finger assembly 5 in the clamping process) is installed on one end of the rotating shaft 61 of the left slide assembly 6, and the right finger potentiometer 8 (for measuring the right finger assembly 3 in the clamping process) Angle information in the process) is installed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More