

Mechanical arm clamp capable of automatically adjusting object shapes
A technology of object shape and mechanical arm, which is applied in the field of mechanical arm fixtures, can solve problems such as single fixing form, small clamping surface, and poor clamping effect, and achieve the effect of increasing the contact area, good bonding force, and good clamping effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034]The present invention will be described in further detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
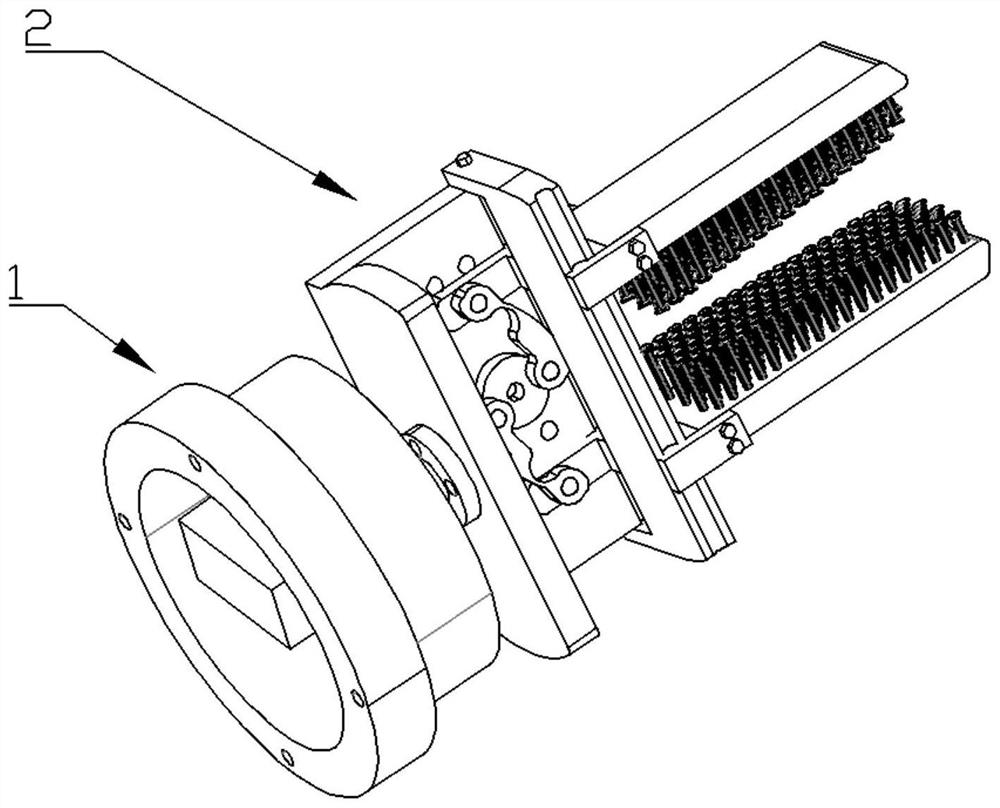
[0035] Such as figure 1 It is a structural schematic diagram of an embodiment of a mechanical arm clamp that self-adjusts the shape of an object, including two parts, a fixedly connected base 1 and a clamping mechanism 2. Usually, the clamping mechanism 2 passes through the base 1 and an external robot or other The ends of the mechanical arms with clamping function are connected;
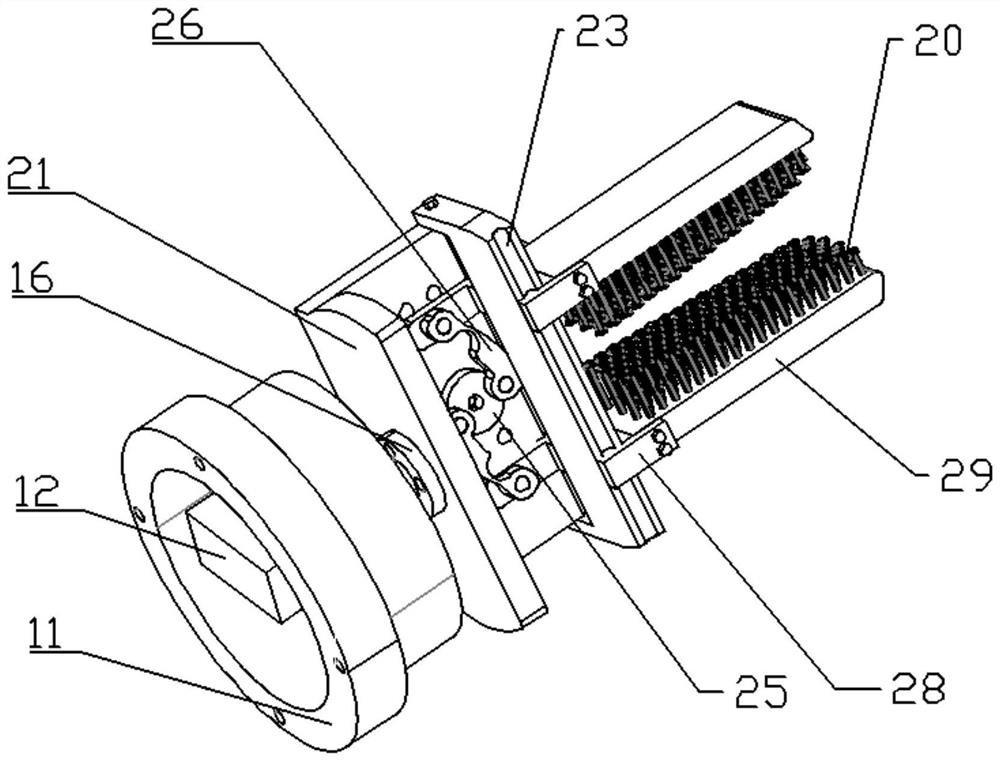
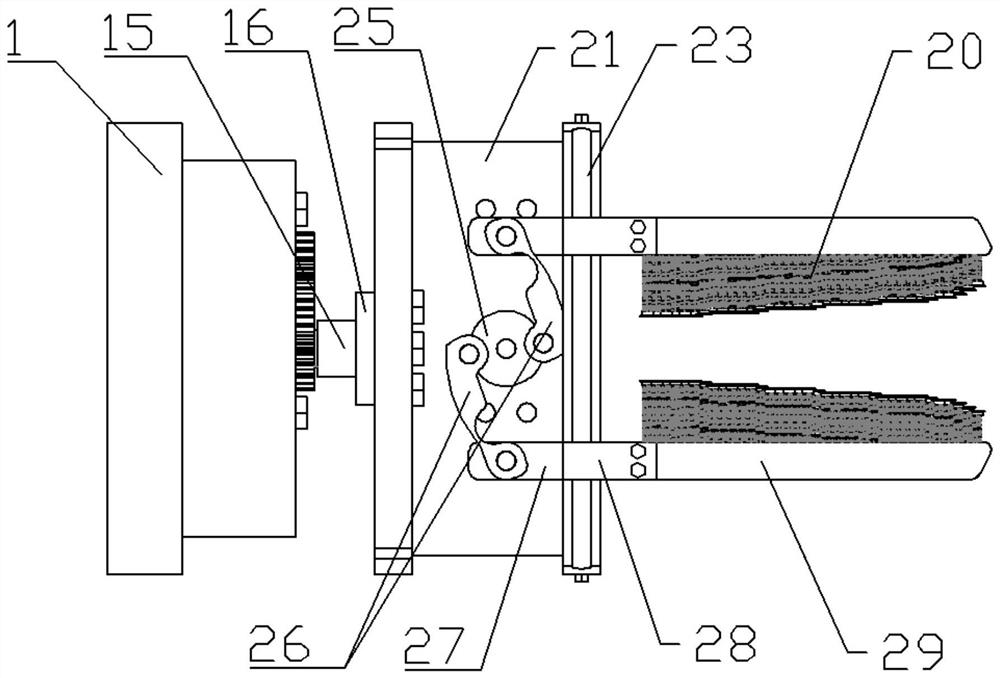
[0036] figure 2 The names of the specific structures of each part of an embodiment of a self-adjusting mechanical arm clamp for object shape are indicated. image 3 is the front view of this embodiment, Figure 4 is the rear view of this embodiment, Figure 5 It is a three-dimensional structure diagram of the clamping mechanism 2. The splint 29 is divided into upper and lower two, which a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More