

Butt jointed crawler type mobile robot
A mobile robot, crawler-type technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of inability to move quickly, self-repair, and reliability, etc., to enhance adaptability, improve flexibility and reliability, reduce The effect of vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below in conjunction with the accompanying drawings.
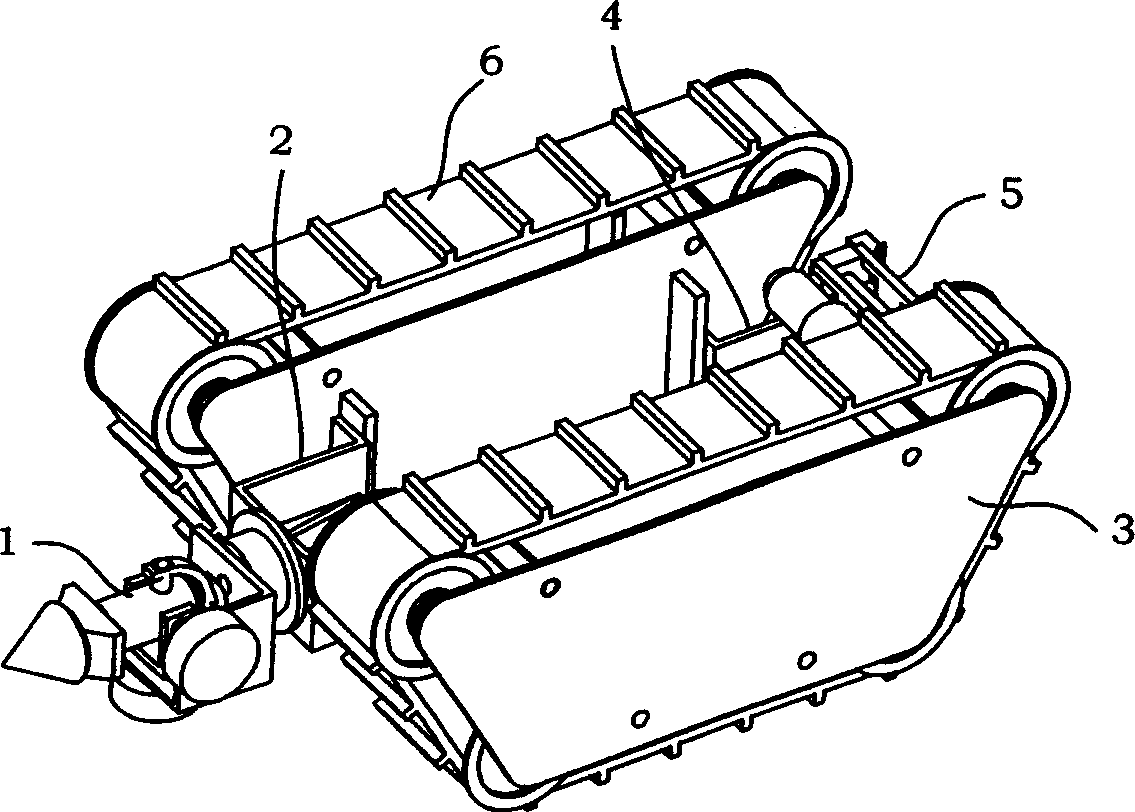
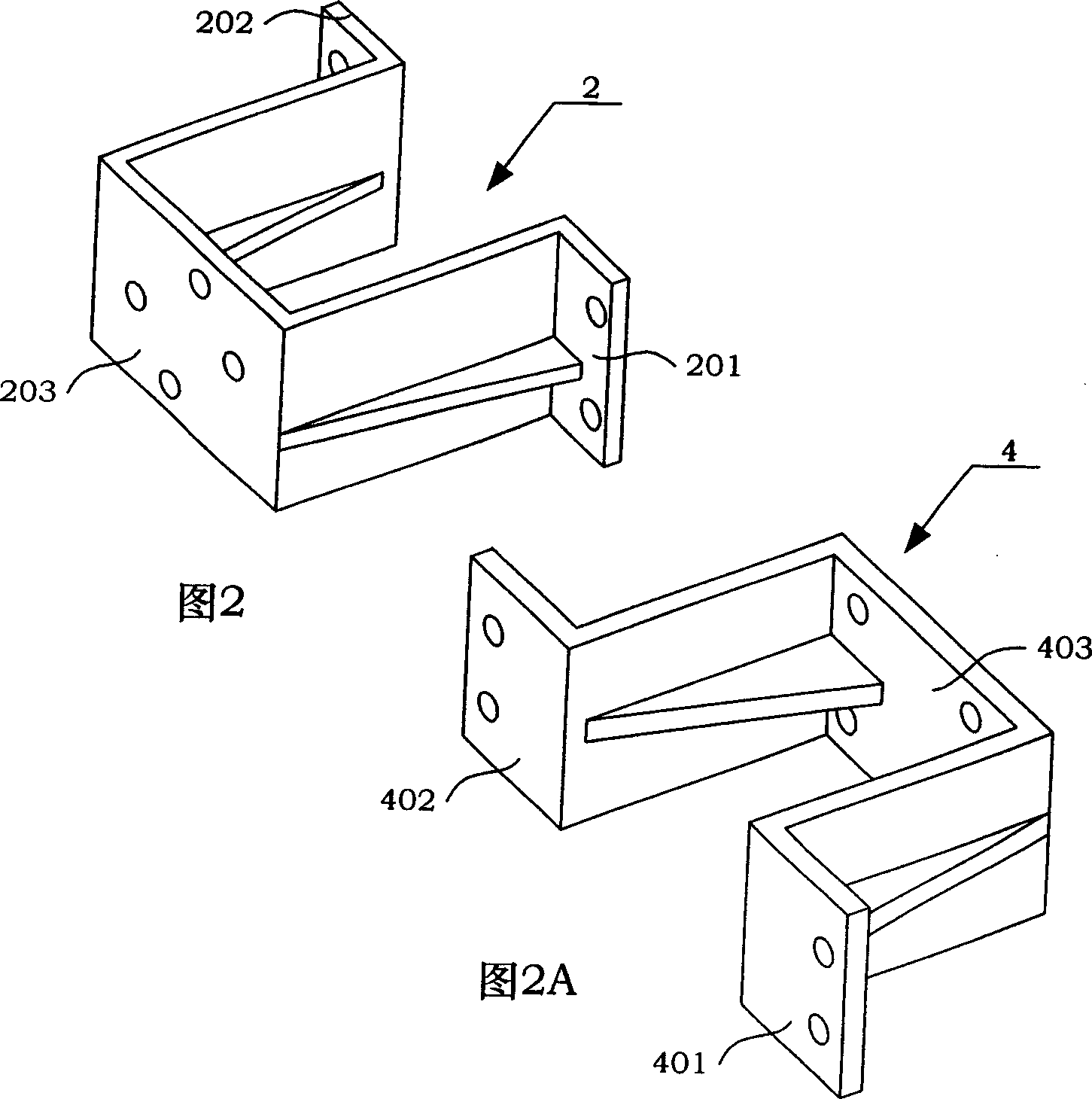
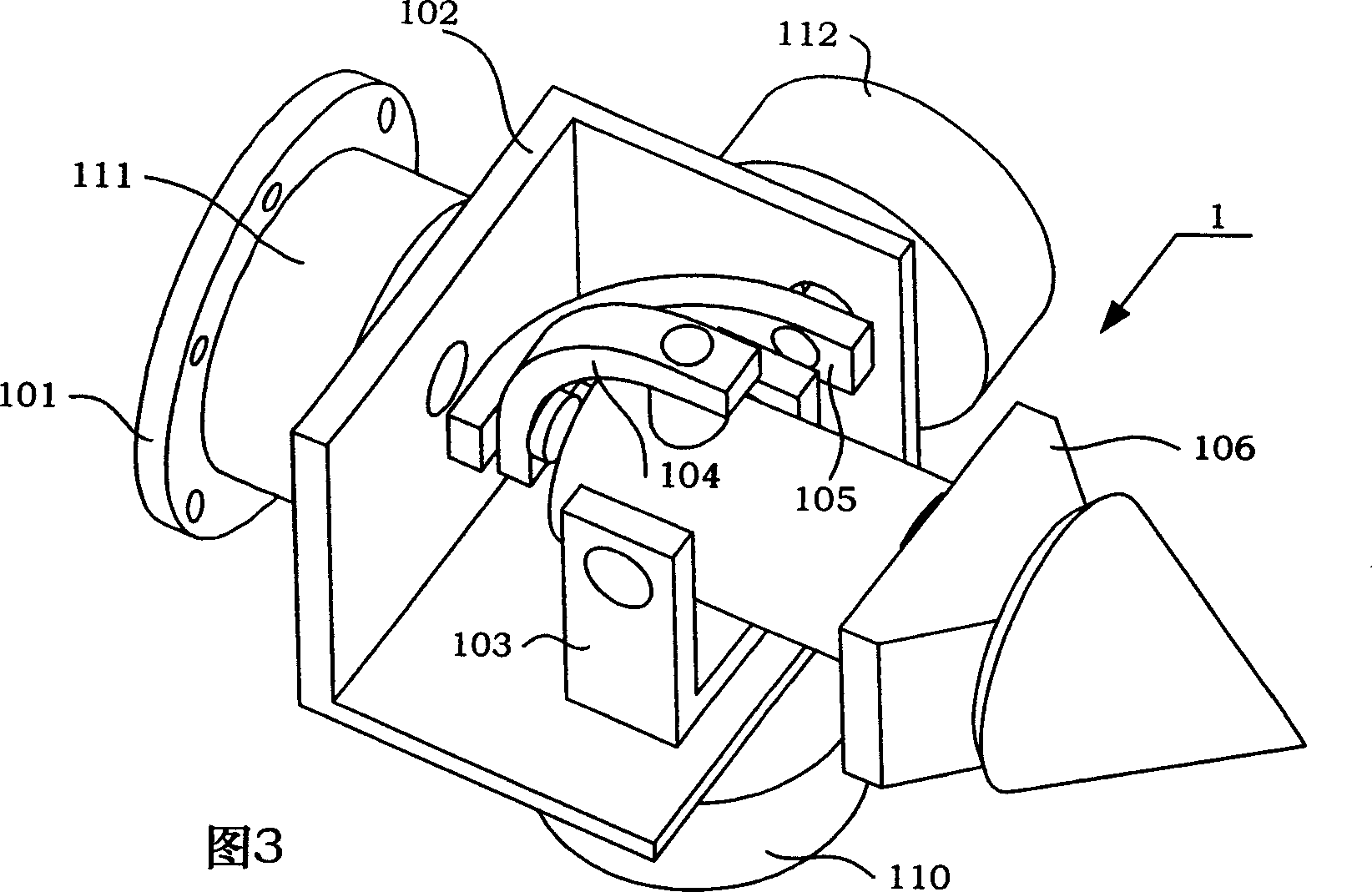
[0024] see figure 1 As shown, the present invention is a dockable crawler-type mobile robot, which is composed of an equivalent spherical hinge mechanism 1, a front connector 2, a rear connector 4, a right support crawler mechanism 3, a left support crawler mechanism 6 and a docking clamping mechanism. Mechanism 5 is made up of, and the structure of right support crawler mechanism 3 is symmetrically identical with the structure of left support crawler mechanism 6, (referring to Fig. 2 shows) the left bottom plate 202 of front connector 2 is fixed with the front connector plate of left support crawler mechanism 6, and front connector The right bottom plate 201 of 2 is fixed to the front connecting plate 304 of the right support crawler mechanism 3, and the upper top plate 203 of the front connecting piece 2 is fixed to the ball hinge base 101 of the equivalent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More