

Robot tool centre point three-component calibration method based on plane measurement
A tool center point, flat plate measurement technology, applied in measurement devices, manufacturing tools, instruments, etc., can solve problems such as large changes in robot joints, multi-robot system errors, and reduced calibration accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
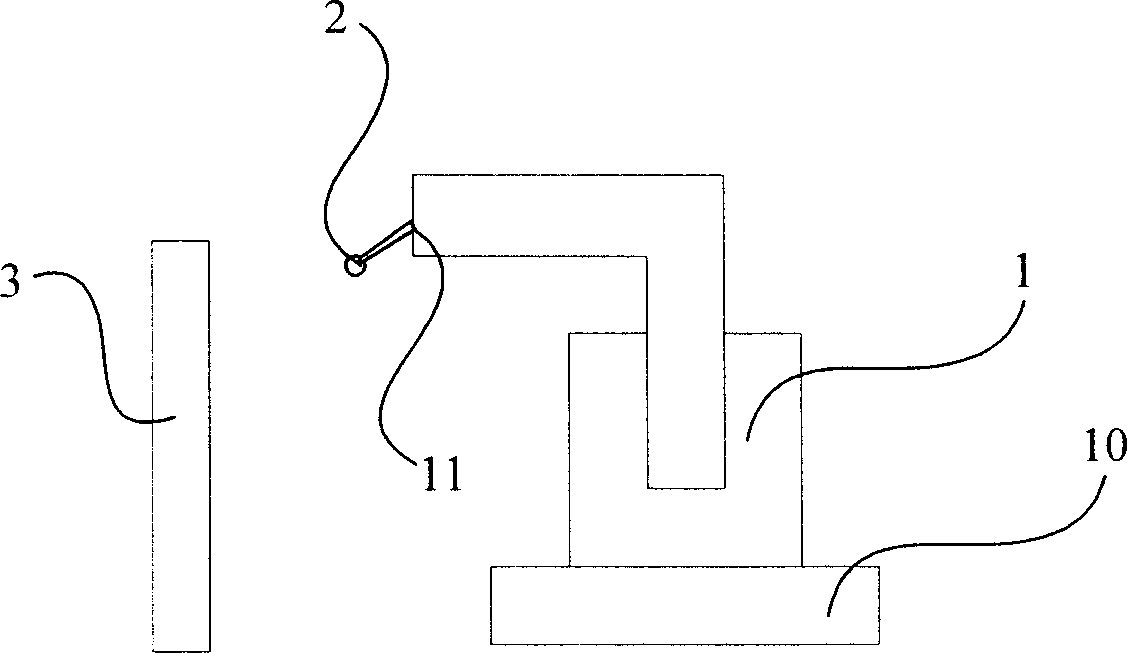
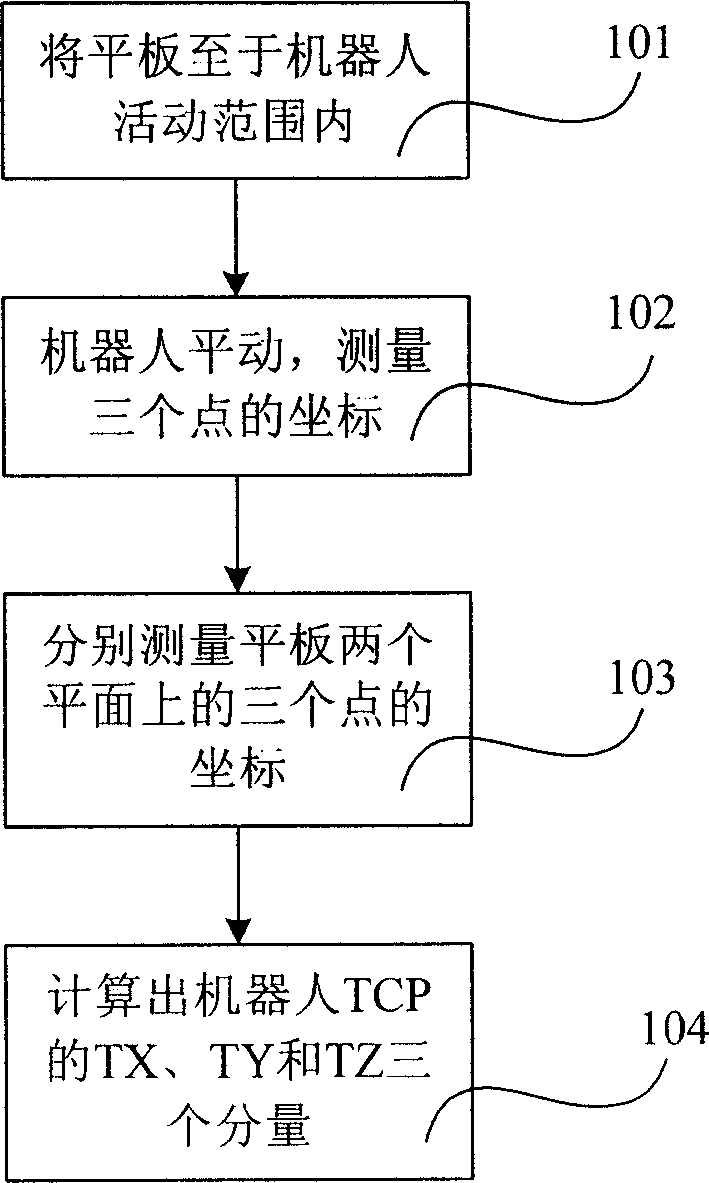
[0024] Embodiment 1: as figure 1 As shown, it is a structural schematic diagram of Embodiment 1 of the present invention, the robot 1 is a six-degree-of-freedom industrial robot, the base 10 is the robot base, tool0 is the coordinate system of the robot end 11, and the measuring probe 2 is fixed on the robot end. Also included is a flat plate 3 with a known thickness. Such as figure 2 Shown, be the flowchart of robot TCP three-component calibration method of the present invention, comprise the following steps:
[0025] Step 101: placing a plate with a flat surface within the range of activity of the robot;
[0026] Step 102: The robot maintains a certain movement direction and moves in translation, measures the coordinates of three or more points on the surface that are not on a straight line, and uses these coordinates to calculate the normal vector of the plane where the surface is located;
[0027] It can be proved that in the measurement of the plane normal vector, onc...
Embodiment 2
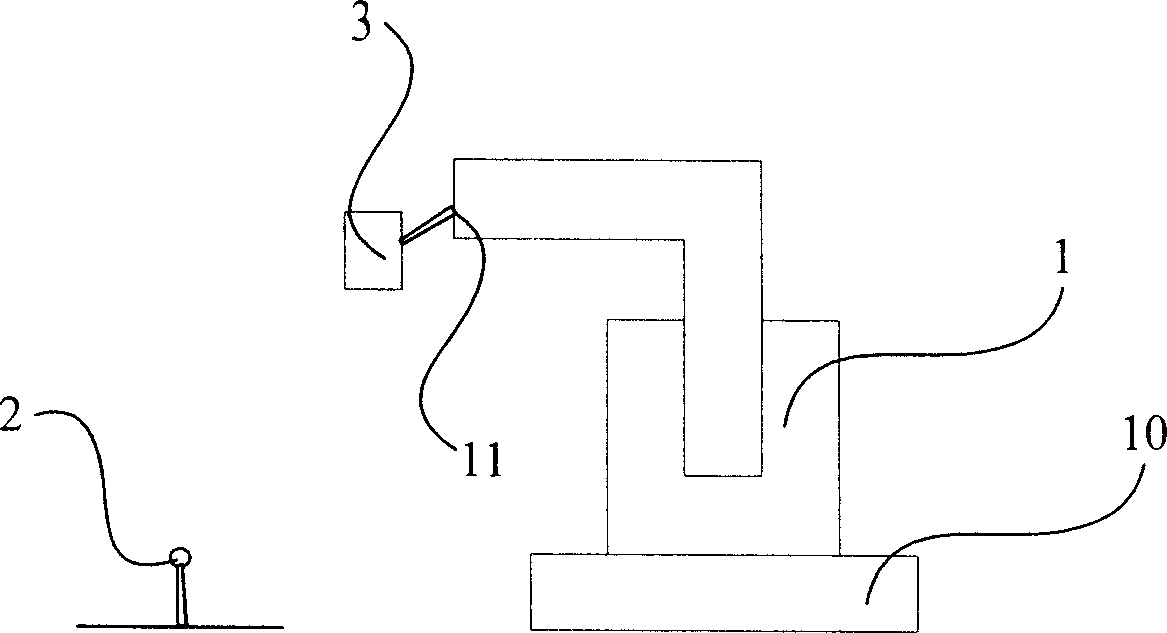
[0107] Such as image 3 As shown, it is a structural schematic diagram of Embodiment 2 of the present invention. The robot 1 is a six-degree-of-freedom industrial robot, the base 10 is the robot base, tool0 is the coordinate system of the robot end 11, and a flat plate 3 with a flat surface is fixed on the robot end. The two surfaces of the flat plate are the first surface and the second surface, and are parallel to each other, and the probe 2 is placed on the ground. Such as Figure 4 As shown, it is a schematic flow chart of the fixed TCP three-component calibration method of the robot of the present invention, including the following steps:
[0108] Step 201: placing the measuring probe within the range of motion of the robot;
[0109] Step 202: The robot maintains a certain movement direction and moves in translation, measures the coordinates of three or more points on the first surface that are not on a straight line, and uses these coordinates to calculate the normal v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More