

Underwater mechanical arm wrist portion structure for high strength operation underwater robot
A technology of underwater robots and underwater machinery, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve problems such as difficult sealing, and achieve the effects of safe and reliable work, high rotational torque, and light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
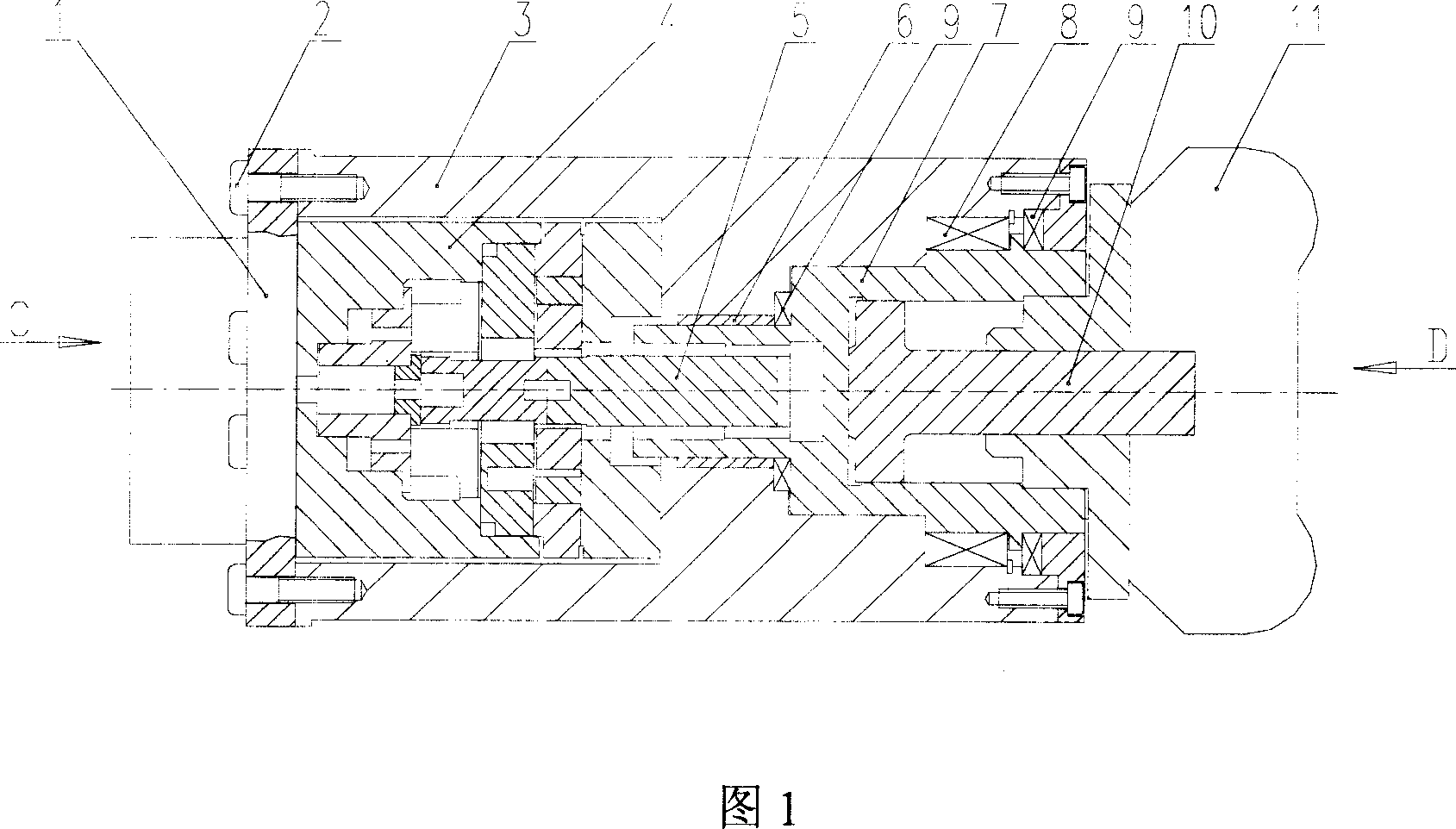
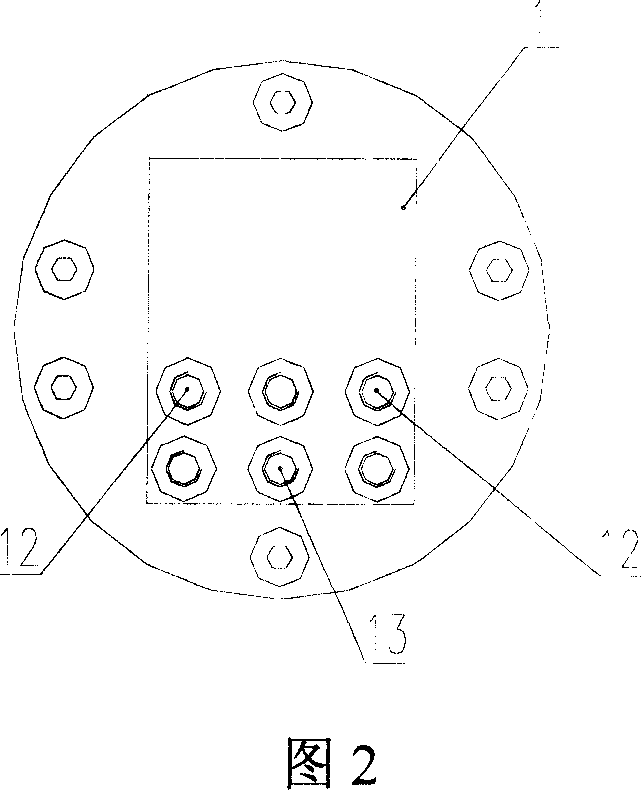
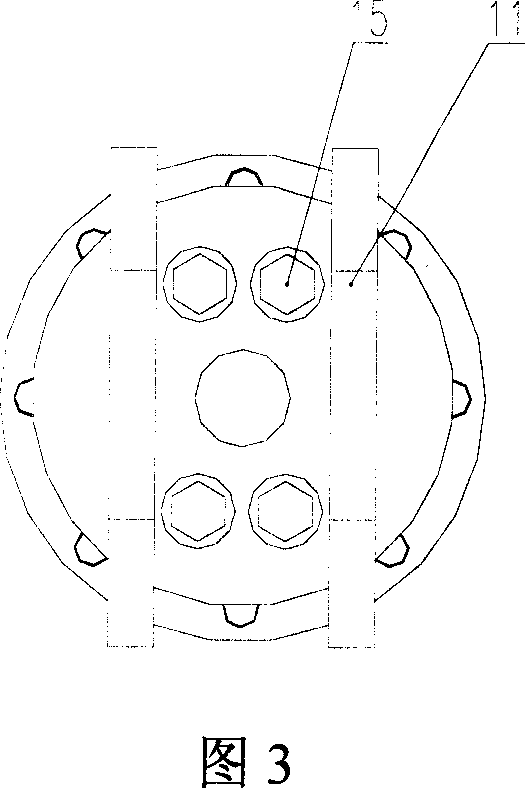
[0013] As shown in FIG. 1, the present invention consists of a wrist back seat 1, a wrist sleeve 3, a cycloid motor assembly 4, a long spline connecting shaft 5, a shaft sleeve 6, a rotating sleeve 7, a radial needle roller bearing 8, and a thrust needle roller. The bearing 9, the short piston rod 10, and the clamp rotating seat 11 are composed, wherein: the cycloid motor assembly 4 is installed in the cavity on one side of the wrist sleeve 3, and the wrist rear seat 1 is sealed on the end face of the wrist sleeve 3 with the sealing screw 2; One end of the long spline connecting shaft section 5 is inserted into the cycloid motor assembly 4, and the other end is inserted into the inner spline groove at one end of the rotating sleeve 7; One end of the rotary sleeve 7 is provided with a cylindrical cavity with a built-in short piston rod 10, and the clamp rotating seat 11 is inserted into the cylindrical cavity of the rotary sleeve 7, and is fixedly connected by screws 15, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More