

Wheel, leg, bounce mechanism combined mobile robot
A mobile robot and compound technology, applied in the field of robots, can solve the problems of poor obstacle surmounting ability, complex mechanism and control, and high energy consumption, achieve high environmental adaptability and obstacle surmounting ability, increase obstacle surmounting ability, and increase vision. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
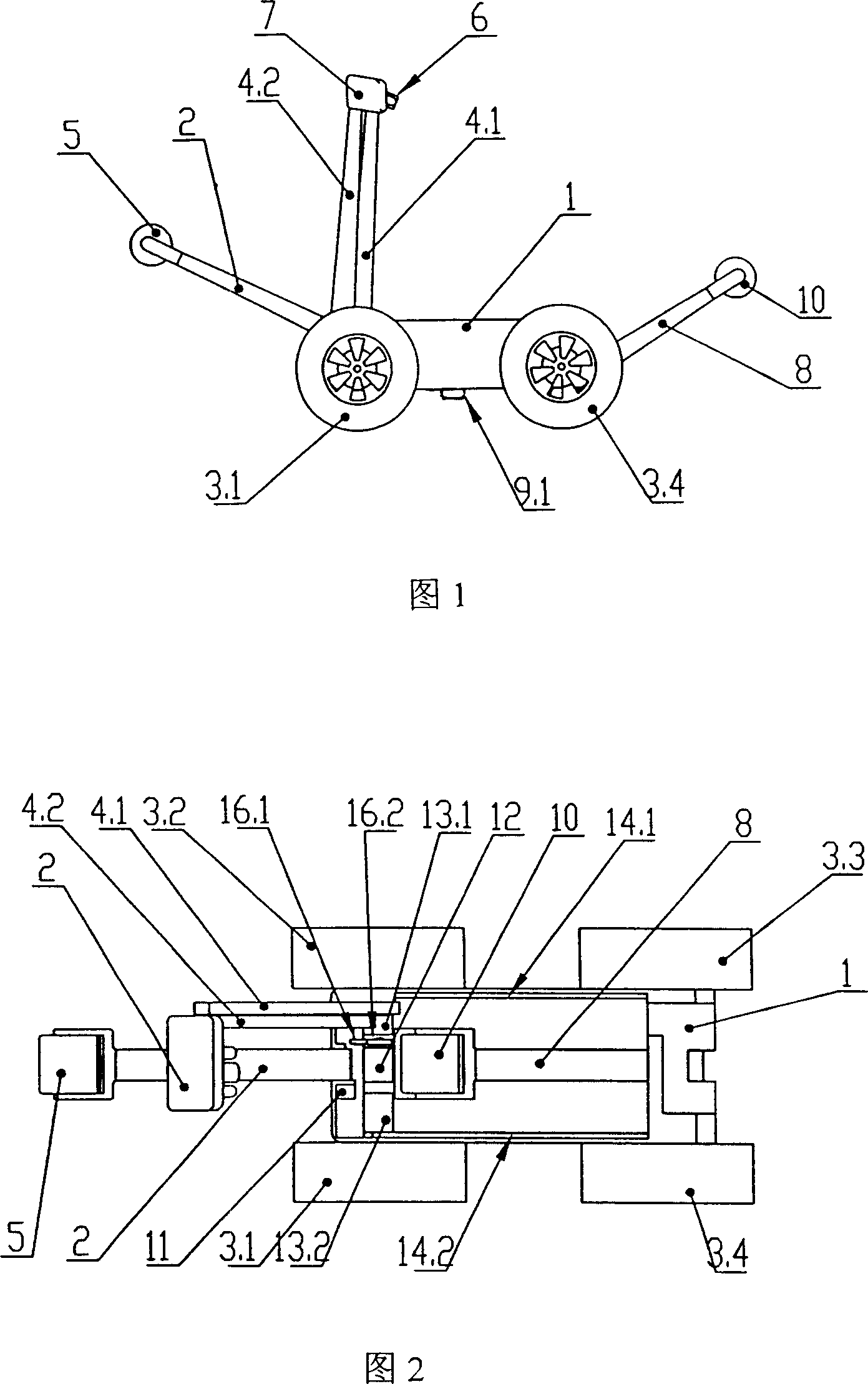
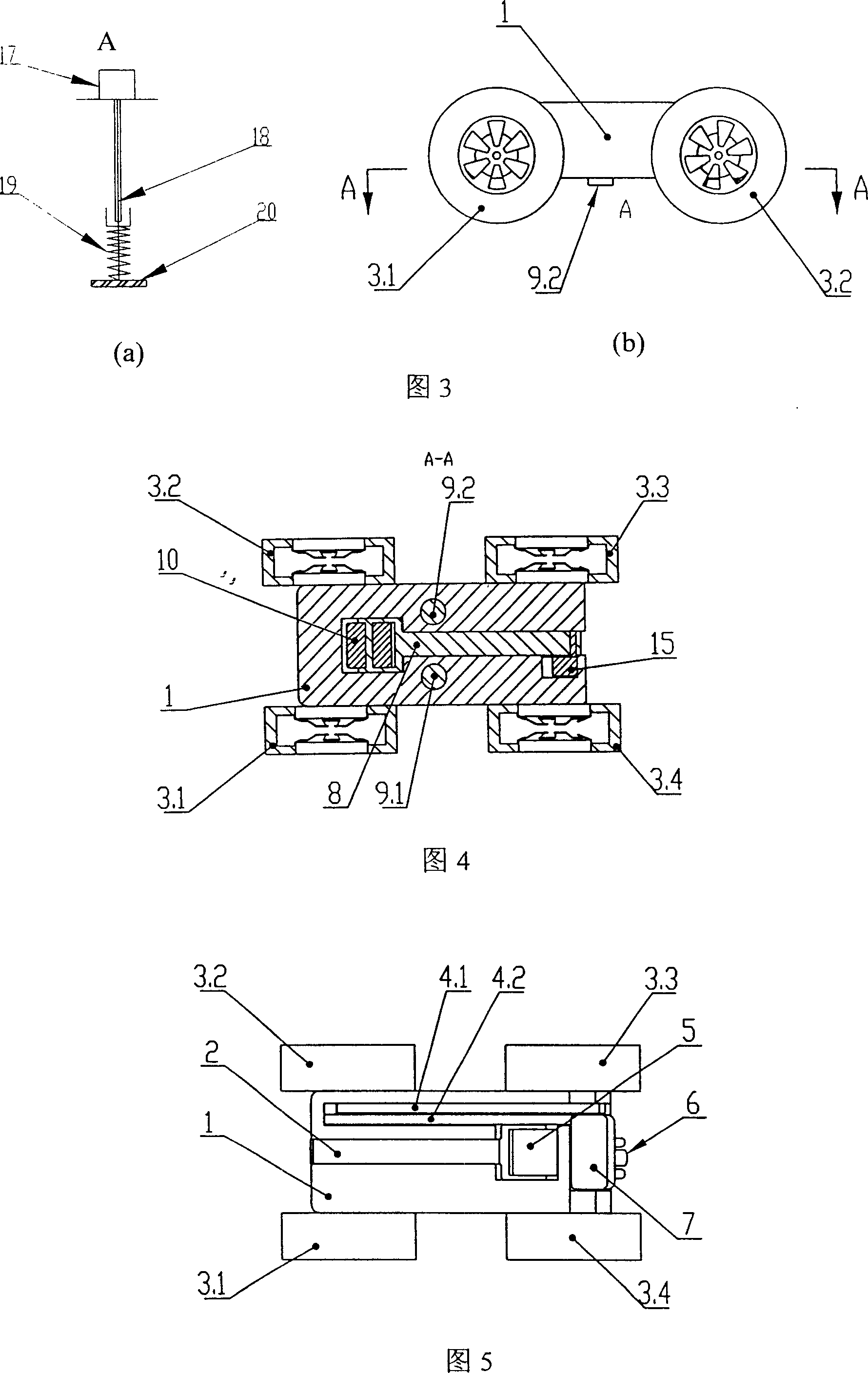
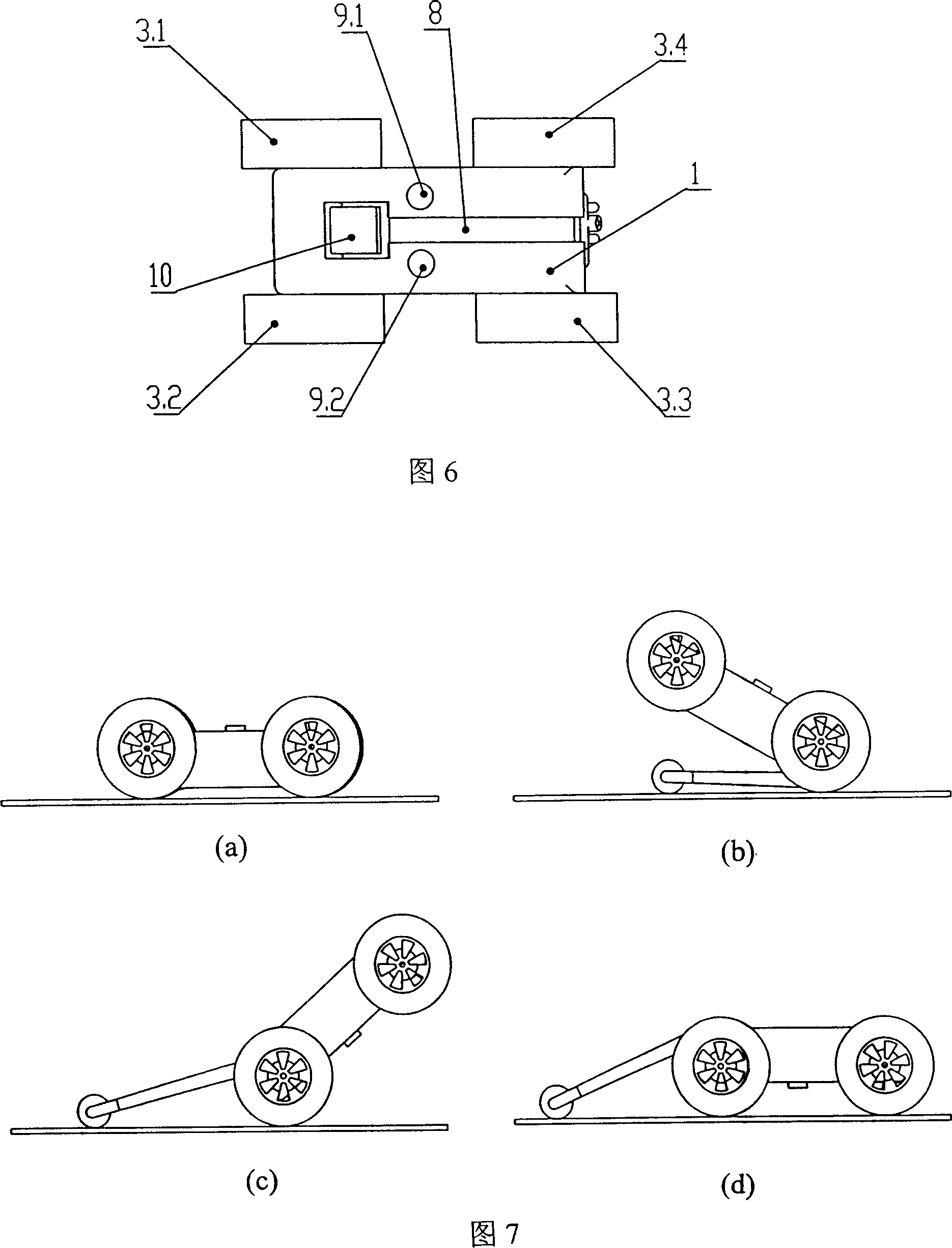
[0021] As shown in Fig. 1~Fig. 6, the present invention has adopted the main body to be four-wheel vehicle body, the structural form of compound front and rear two swing wheel legs and bouncing mechanism. 4 drive wheels 3 are installed on the robot car body 1, two rear wheels 3.1,3.2 are driven by wheel drive motors 13.2,13.1 respectively, and two front wheels 3.3,3.4 are also driven by wheel drive motors 13.1, 14.2 by synchronous belt 14.1,14.2 respectively. 13.2 Drivers. A front swing wheel leg 8 is installed in the front of the car body 1, which is driven by a front swing wheel leg drive motor 15, and a rear swing wheel leg 2 is installed at the rear, which is driven by a rear swing wheel leg drive motor 11. The installed shaft rotates freely, and the ends are equipped with wheels 5 and 10. The bottom and top of the car body 1 are provided with groo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More