

Tactile processing device
a processing device and a technology of a tactile body, applied in the direction of measurement devices, instruments, material analysis, etc., can solve the problems of difficult to control the frictional feel independently difficult to control the frictional feel by using only the ultrasonic vibrator, so as to simplify the configuration and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
embodiment 1
[0154]A device for searching for a material by estimating the specific type of the feel to be gotten particularly intensely by the feeler and its tactile intensity by observing his or her fingertip's movement (i.e., by determining what kind of tactile movement has been performed) will be described as a first specific preferred embodiment of the present invention. This device estimates the tactile intensity H by the following Equation (8), which is obtained by modifying Equation (7):
H(m)=C(m)·X (8)
where m is a variable representing the kind of the tactile movement and will be referred to herein as a “tactile movement variable m”. This equation means that a tactile weight vector for use to obtain the tactile intensity is variable with the tactile movement variable m and that if a different type of tactile movement is performed on a material, then a different tactile intensity H will be obtained.
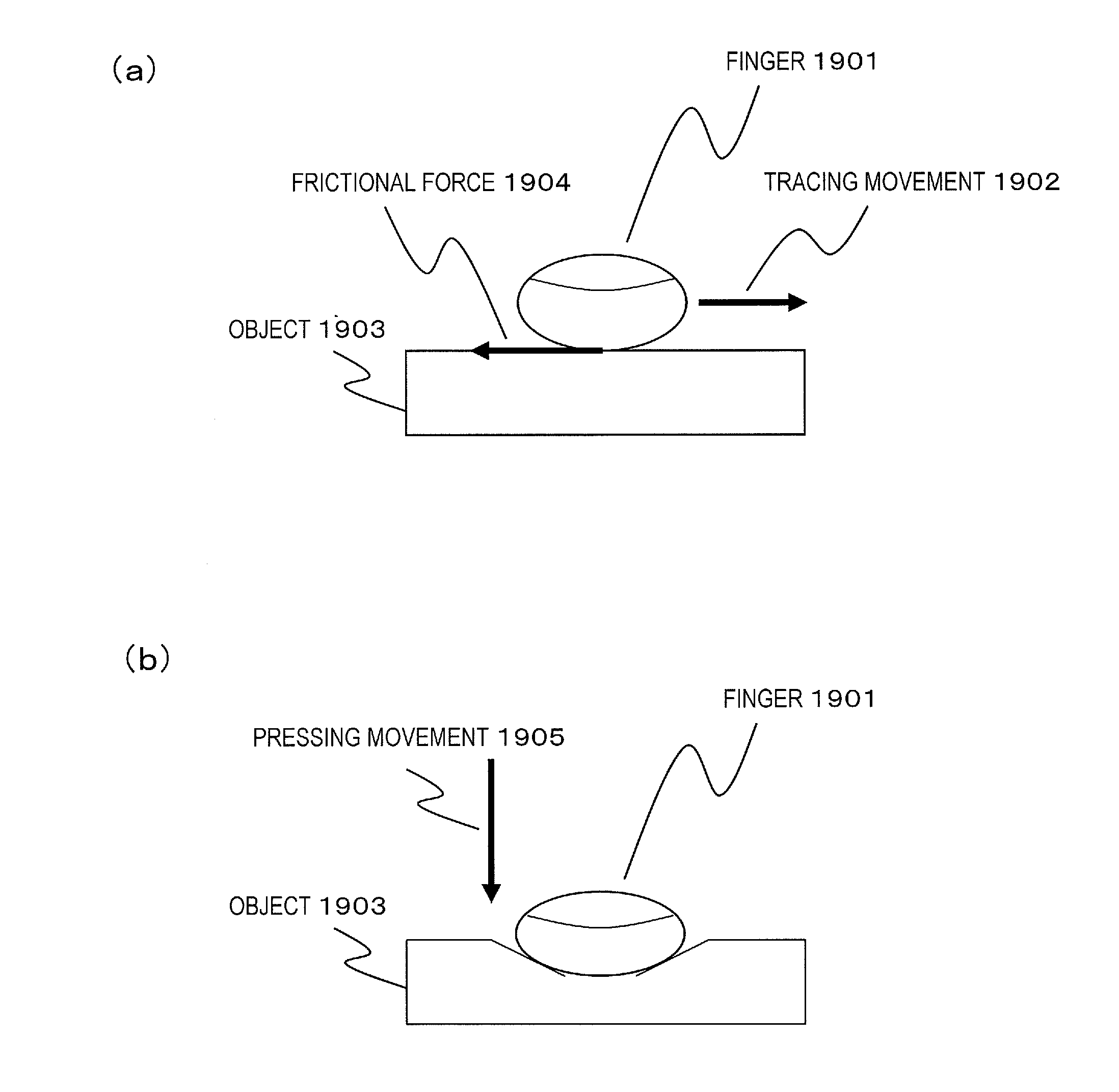
[0155]For example, the tactile intensity H(m1) to be obtained when a tracing movement is ...
embodiment 2
[0228]In the first preferred embodiment of the present invention described above, the type of the feel that the feeler is getting is supposed to be estimated unequivocally by the kind of the tactile movement. Actually, however, even though feelers are getting quite different types of feels, their tactile movements could be very similar and the tactile movement variables m represented discretely could be the same. In that case, even if the tactile movement variable m is determined by the kind of the tactile movement the feeler is performing, the feel he or she is getting cannot be determined automatically, which is a problem. According to this preferred embodiment, however, such a problem can be overcome by adopting the idea of probability model.
[0229]First of all, it will be described how in principle the type of the feel can be estimated by the tactile movement variable m following the probability model.
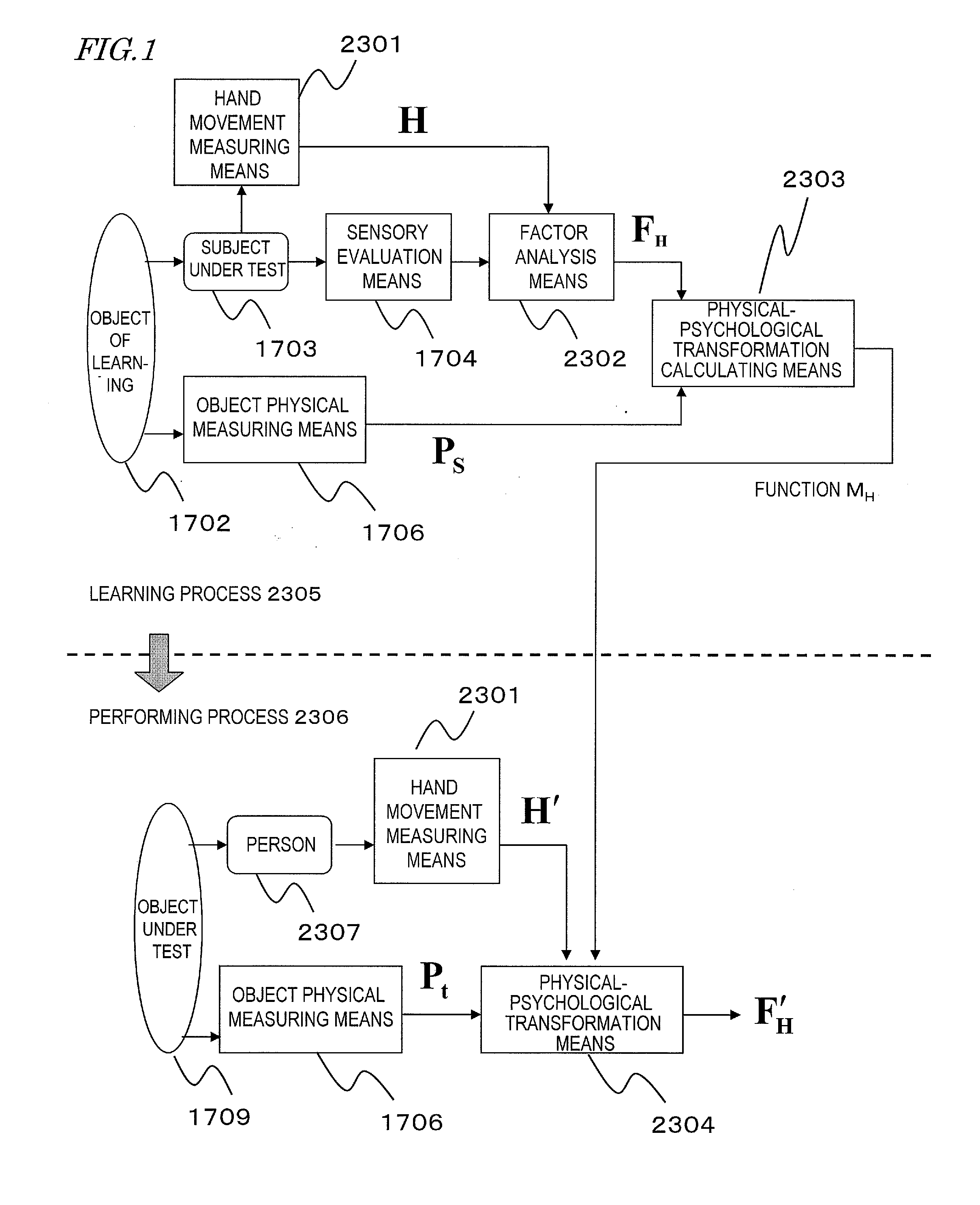
[0230]Suppose in a learning process in which the feeler who is a subject under ...
embodiment 3
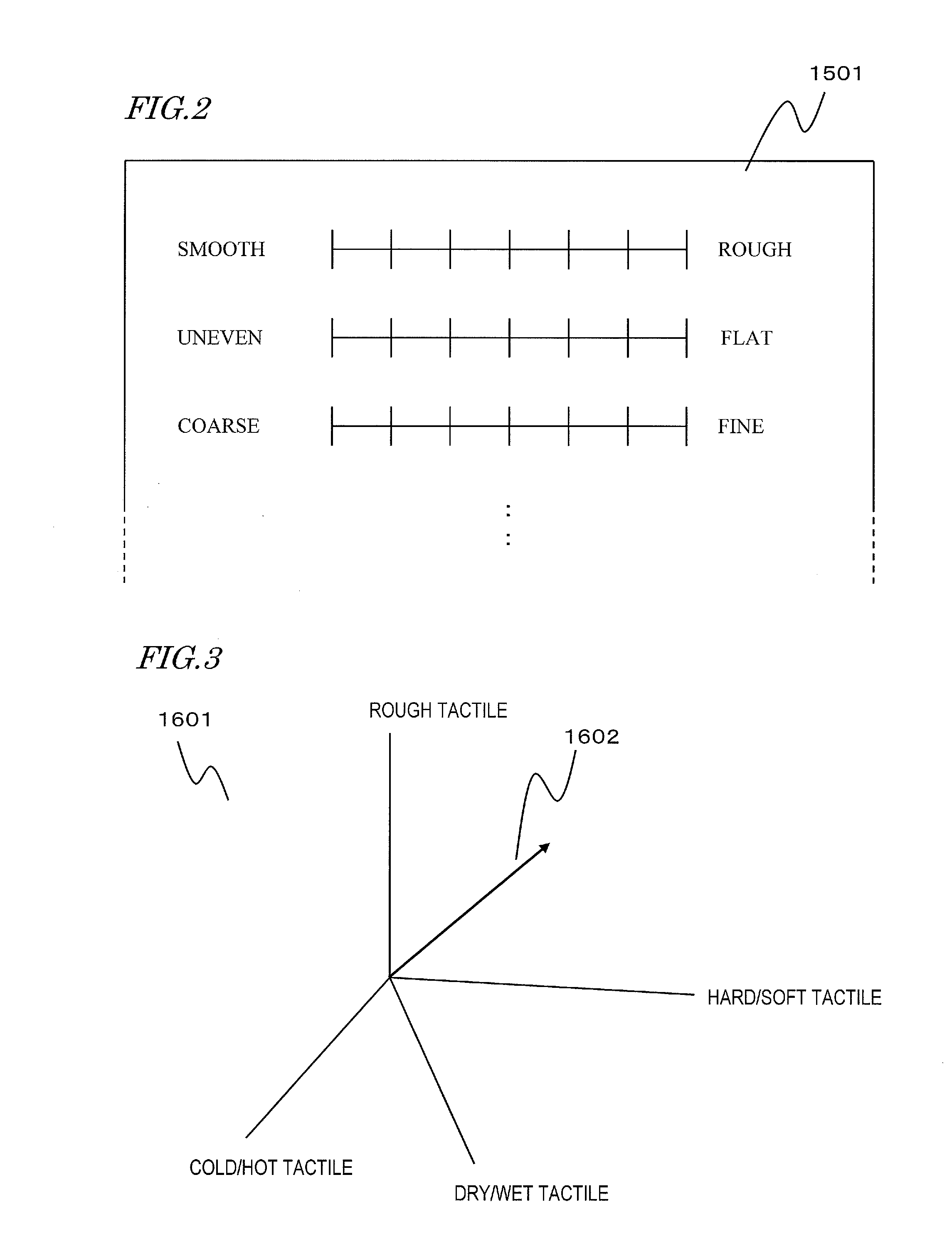
[0275]According to the principle of the present invention that has already been described at the beginning of the description of the first preferred embodiment, by expressing a feel as a vector, of which the components are represented by the respective tactile intensities of multiple types of feels, a variation in feel with the change of kinds of tactile movements can be processed more directly. First of all, this principle will be described.
[0276]Suppose the number of tactile types is M. If the tactile intensity associated with each type of feel the feeler is getting is identified by Hk, the overall feel can be represented as an M-dimensional column vector by the following Equation (18):
H=(H1⋮Hk⋮HM)(18)
This vector will be referred to herein as a “tactile feature quantity vector”. In this case, the variation in tactile intensity with the tactile movement variable m represented by Equation (8) can be expressed by the following Equations (19):
H(m)=C(m)·XwhereC(m)=(C10(m)C11(m)⋯C1n(m)⋮...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More