

Systems and methods for 2D image and spatial data capture for 3D stereo imaging
a technology of spatial data and image capture, applied in the field of three-dimensional (3d) stereo imaging, can solve the problems of insufficient collection of geometrically inaccurate to the original scene, and the actual image-capture process is not accurate enough to collect true 3d information for the given scene. , to achieve the effect of accurate range data determination and simplified addition of cg visual effect elements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043]The present disclosure relates generally to creating three-dimensional (3D) stereo images from two-dimensional (2D) photography, and in particular to systems and methods for 2D image capture and post-processing for 3D stereo imaging. The disclosure sets forth an overview of the 3D stereo imaging system and its components. The various components of the 3D stereo imaging system are then described in greater detail. Then, a variety of embodiments of the methods of the disclosure based on the operation of the 3D stereo imaging system are described. The terms “right” and “left” as applied to the witness cameras are relative to the 3D imaging system and its view of the scene.
[0044]Various algorithms used to carry out the systems and methods of the invention are described herein along the way, and are also set forth in more detail in an “algorithms” section toward the end of this Detailed Description.
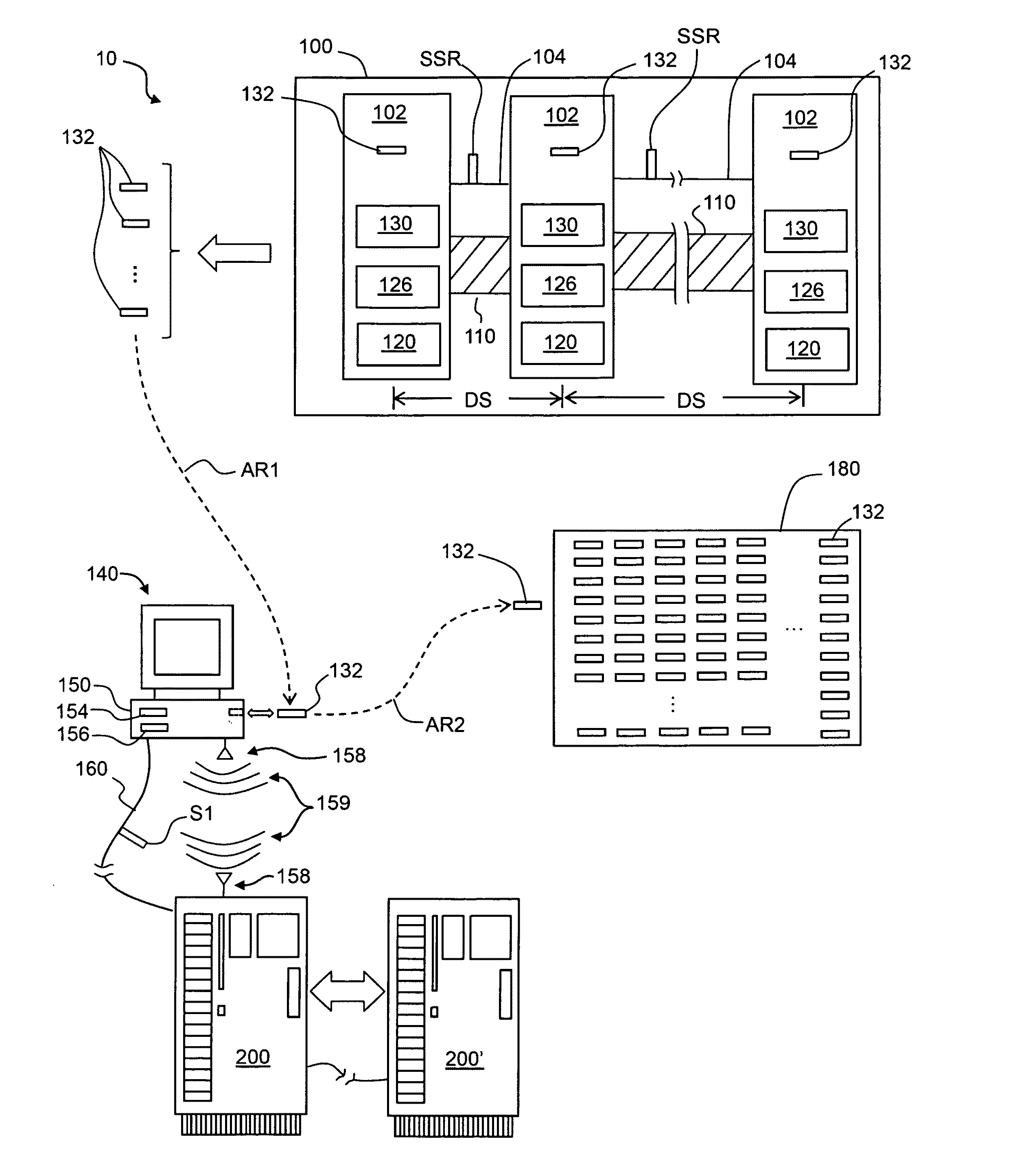
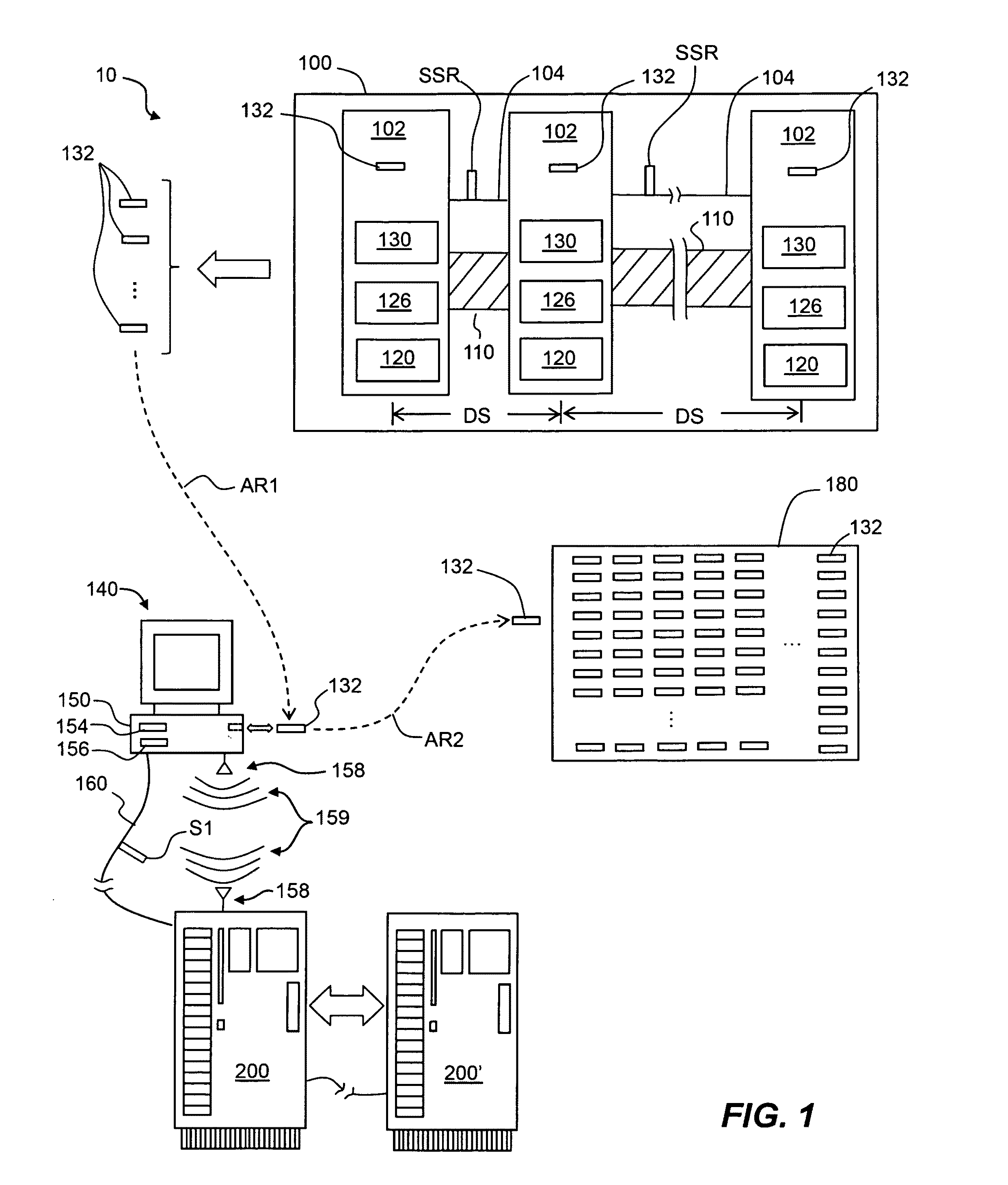
[0045]FIG. 1 is a generalized schematic diagram of the 3D st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More