

Ultra-precision robotic system
a robotic system and ultra-precision technology, applied in the field of robotic systems, can solve the problems of inability to accurately determine the positioning accuracy of the technology, and inability to accurately predict the positioning accuracy of the robo
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
Shadow Robotic Measurement System of the Invention
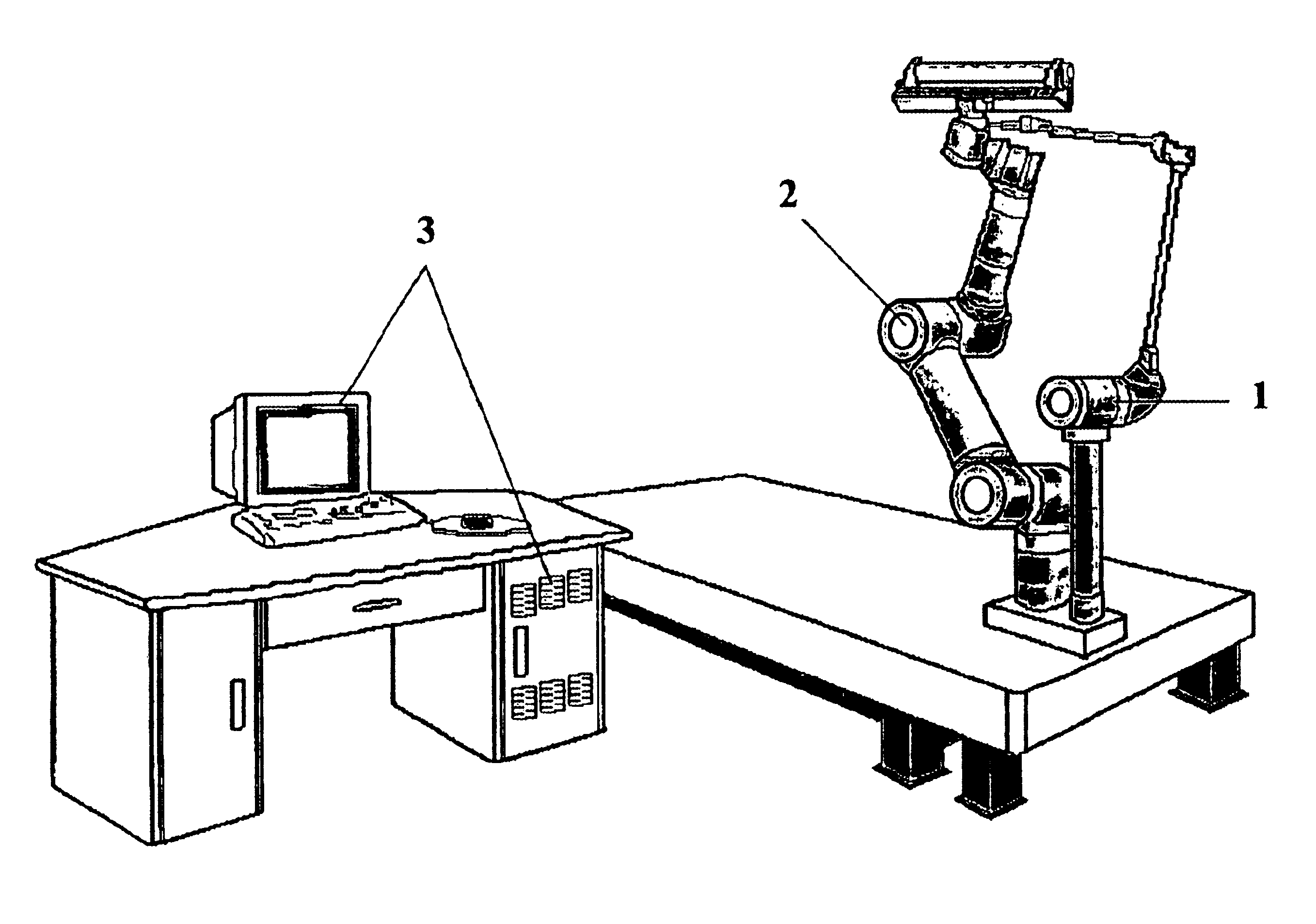
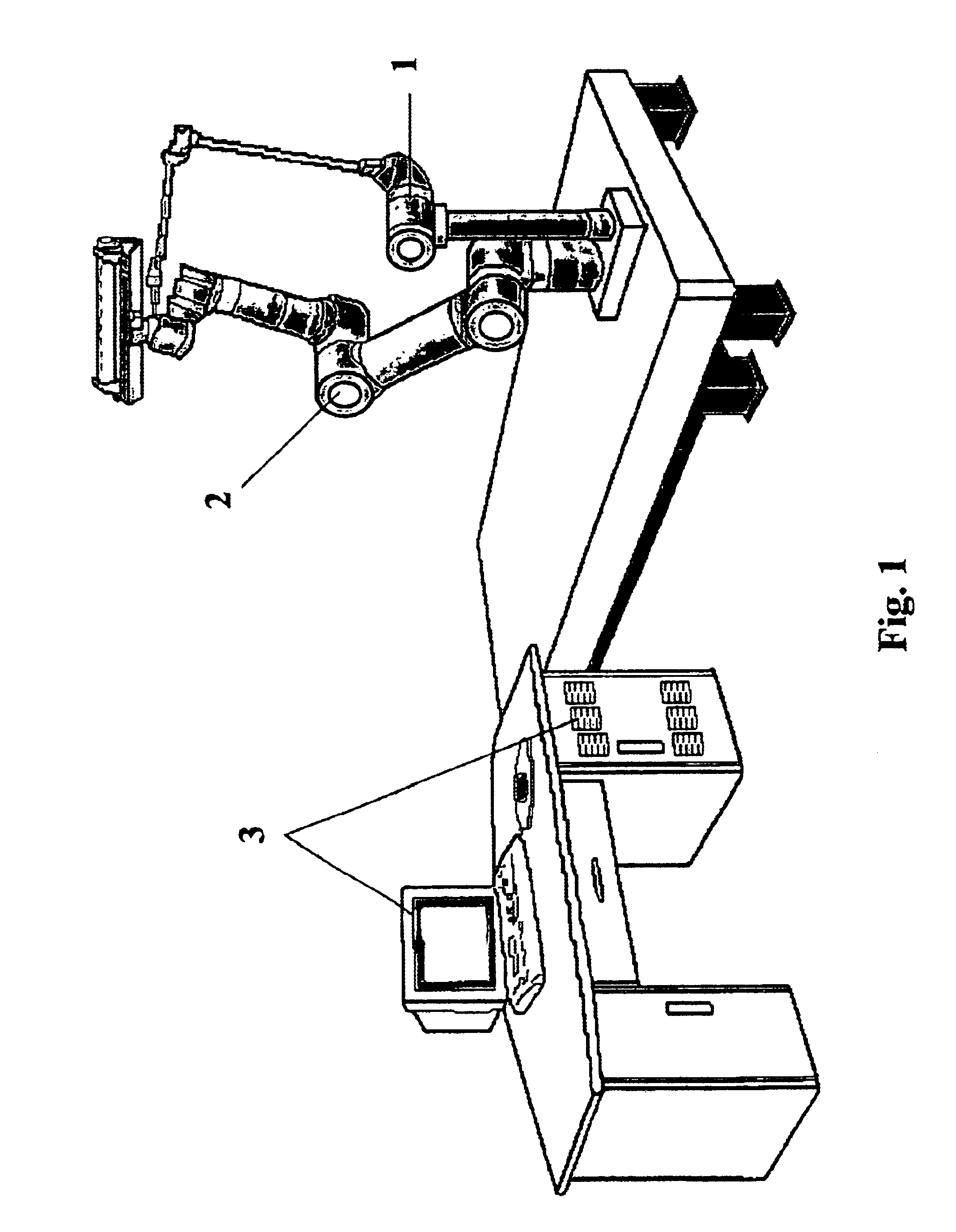
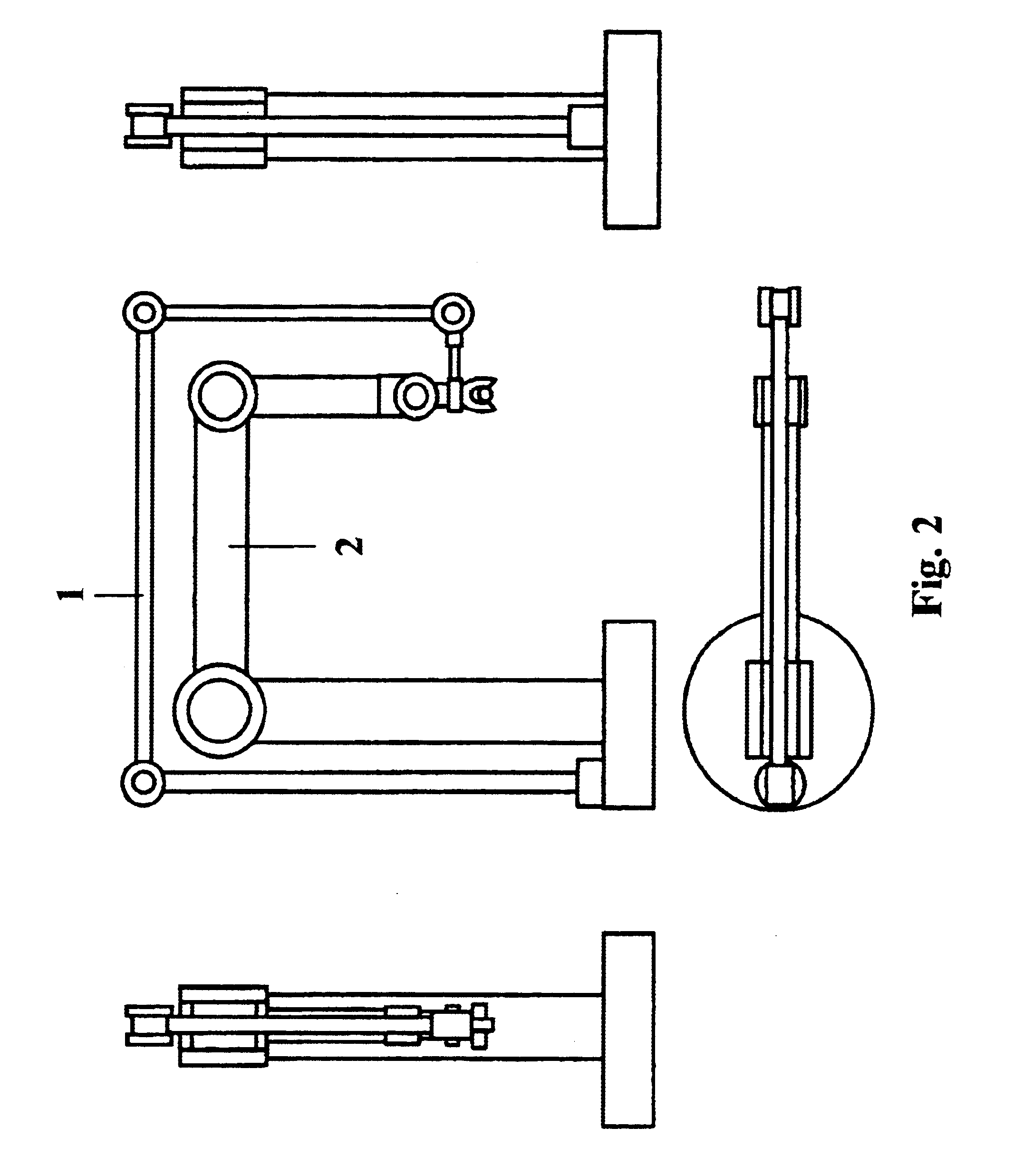
[0043]In this invention, an ultra-precision robotic system is developed based on the development of the novel technology of multiple DOF ultra-precision shadow robotic measurement system (shadow system,) which can effectively resolve the above-mentioned degrading problems to achieve the ultra-precision positioning accuracy with no significant difficulties. FIG. 1 depicts that such an ultra-precision robotic system. In FIG. 1, (1) is an embodiment of multiple DOF ultra-precision shadow robotic measurement system, (2) is an embodiment of multiple DOF robot, and (3) is the robotic control with corresponding computer system. FIG. 2 depicts the basic structure of such an ultra-precision robotic system with more detailed different views. In FIG. 2, it shows that for a 6-DOF robot, an ultra-precision shadow robotic measurement system with at least 6 DOF is built to match the DOF of robot. The said 6-DOF robot and the said shadow system are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More