

Collision time estimation apparatus for vehicles, collision time estimation method for vehicles, collision alarm apparatus for vehicles, and collision alarm method for vehicles
a technology for collision alarms and vehicles, which is applied in traffic control systems, transportation and packaging, instruments, etc., can solve the problems of inability to easily calculate collision time, increase computation complexity, and increase the amount of movement of edges, so as to facilitate the calculation of collision time, reduce the effect of collision alarms and robust output against position detection errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026]With reference to the accompanying drawings, configurations of a collision time estimation apparatus for vehicles and a collision alarm apparatus for vehicles according to the preferred embodiments of the present invention will be described below.
Configuration of Collision Time Estimation Apparatus for Vehicles
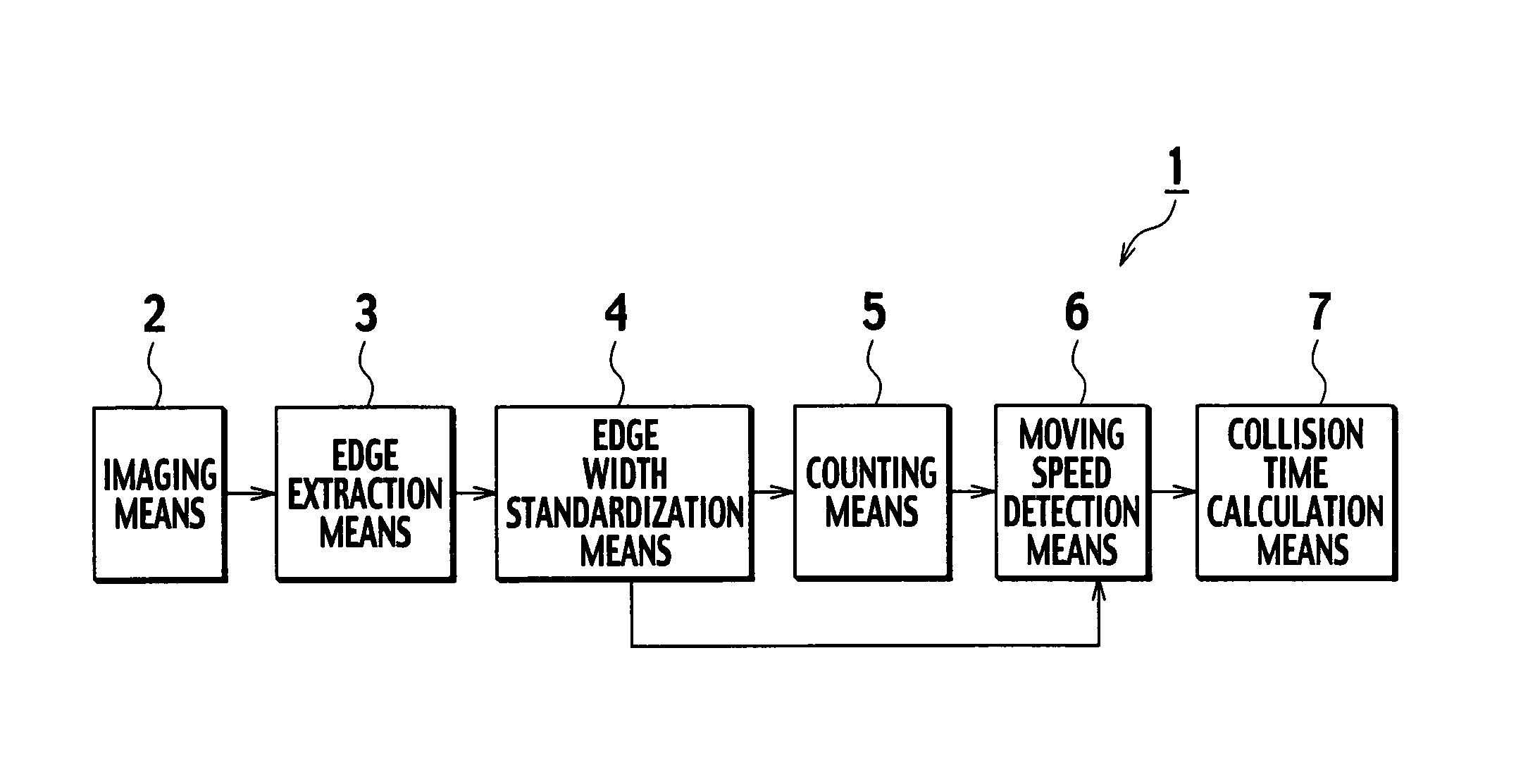
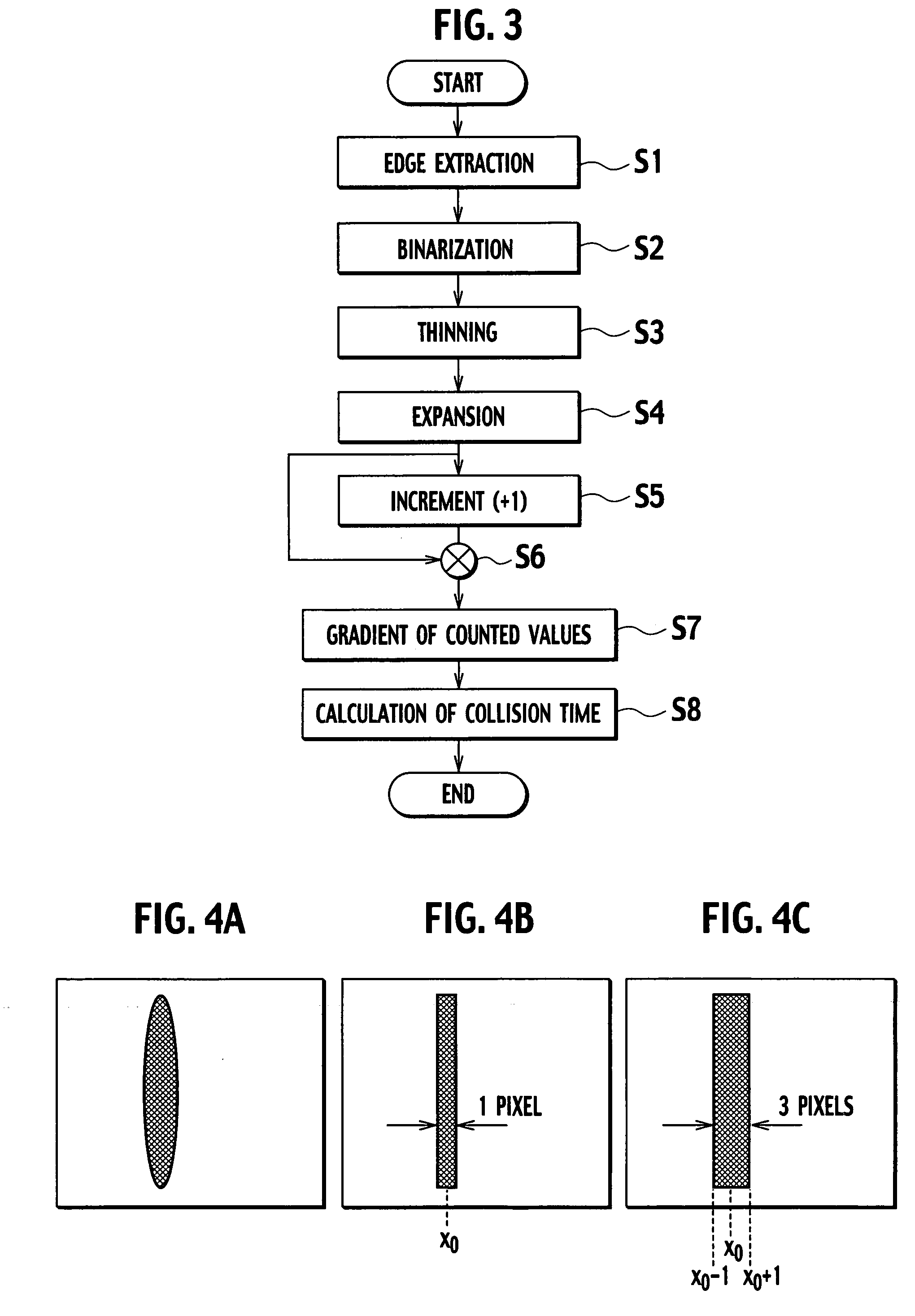
[0027]A collision time estimation apparatus for vehicles 1 according to an embodiment of the present invention is provided in a vehicle and includes, as shown in FIG. 1, imaging means 2 for picking up an image of the area around a vehicle, edge extraction means 3 for extracting an edge image, by using a Sobel filter, from temporally successive images picked up by the imaging means 2, edge width standardization means 4 for standardizing the edge width of the edge image extracted by the edge extraction means 3 to a predetermined number of pixels, counting means 5 for storing, as a count-up mask 14 (see FIG. 2), information as to over how many frames the standardized edge i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More