

Upper limb measurement and rehabilitation method and system
a technology for measuring the upper limb and rehabilitation, which is applied in the field of rehabilitation patients with stroke, can solve the problems of inability to perform functional movements with the impaired limb, the financial burden estimated at thirty billion dollars annually, and the traditional rehabilitation methods that are least effective in treating the hemiparesis of the upper limb, etc., and achieves reliable results and simple administration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032]To further illustrate the present invention, a more detailed discussion of the various possible embodiments of the present invention is provided below. It will be understood that these specific details are for the purpose of illustration only and are not to be construed as limiting in any way.
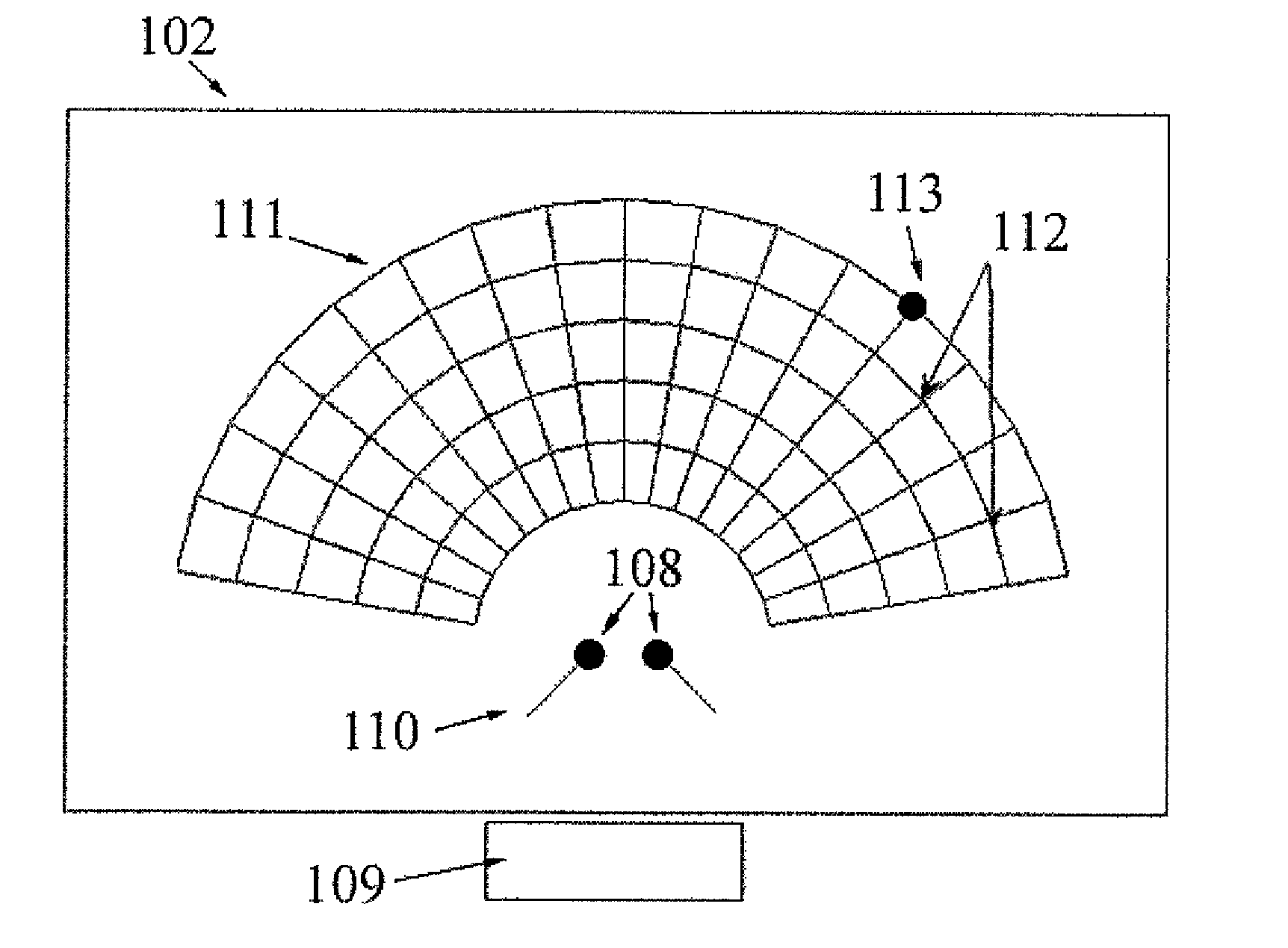
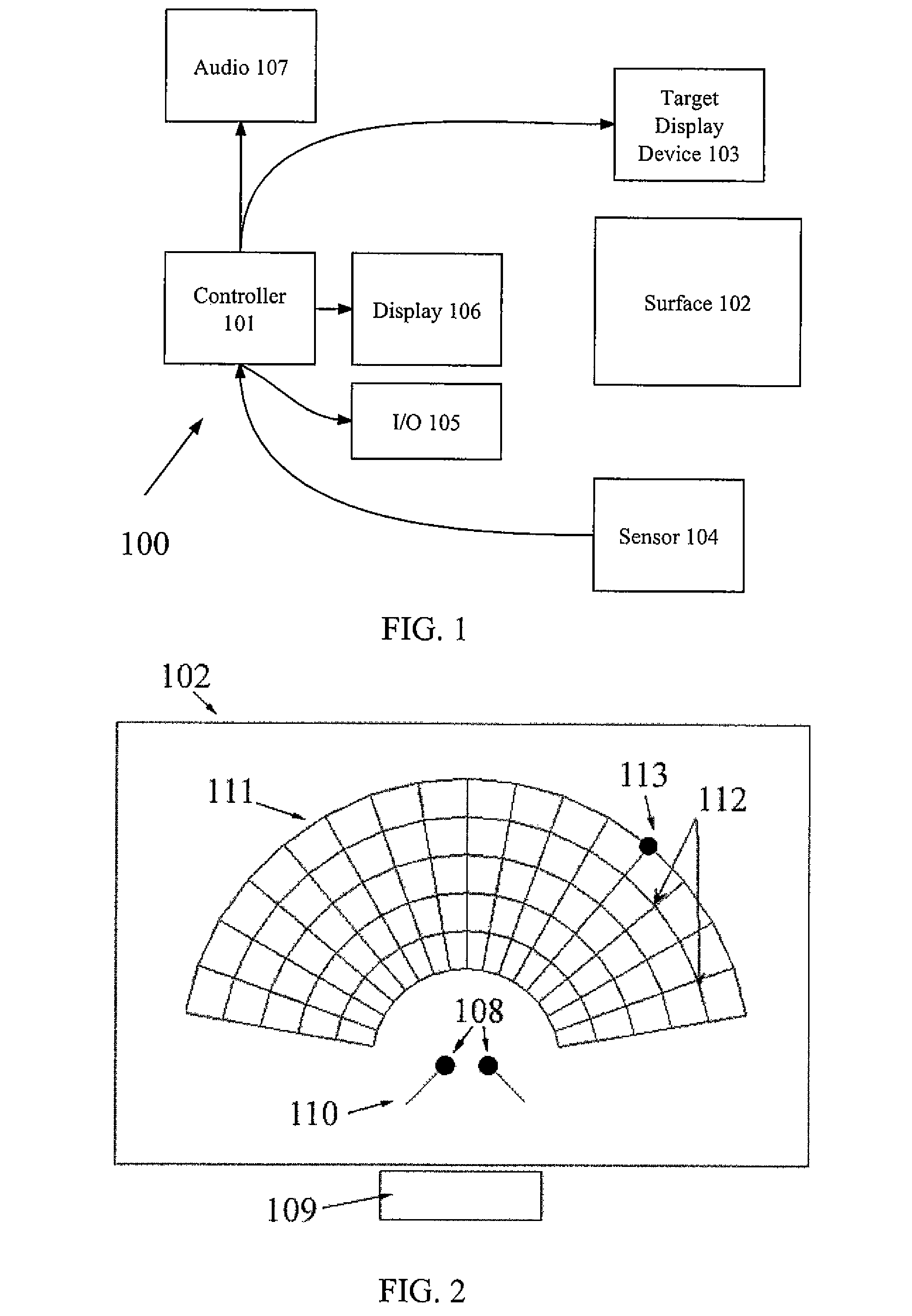
[0033]FIG. 1 illustrates an arm use and non-use measurement system 100. In one embodiment, a controller 101, two-dimensional surface 102, target display device 103 and position sensor 104 are provided. The target display device 103 is for example, an overhead light projector. A user is seated next to the two-dimensional surface 102, such as a table, so as to be able to reach across the table with either hand. The controller 101 is connected to the target display device 103, the position sensors 104, an input device 105, as well as a display 106 and audio device 107 to provide user feedback. The controller 101 includes a storage device (not shown) that stores the measurement control progra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More