

Safety type rigidity variable mechanical joint
A mechanical joint and safe technology, applied in the field of robotics, can solve the problems of increasing the nonlinear and hysteresis factors of the system, increasing the additional weight, and reducing the contact stiffness of the system, so as to enrich the characteristics of variable rigidity, reduce load and power consumption, and improve safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] Embodiments of the present invention are described in detail below in conjunction with accompanying drawings: the present embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the scope of protection of the present invention is not limited to Examples described below.
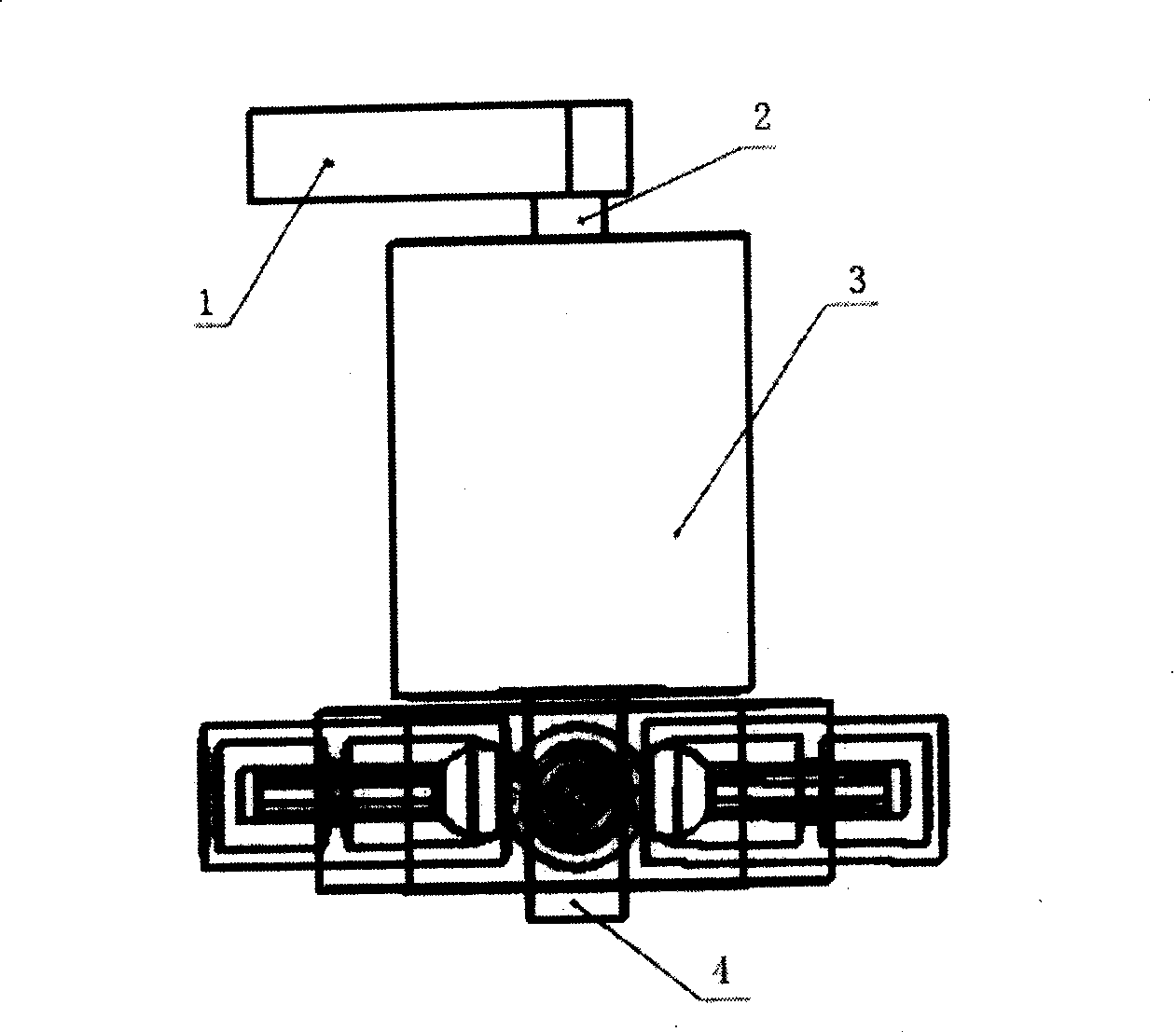
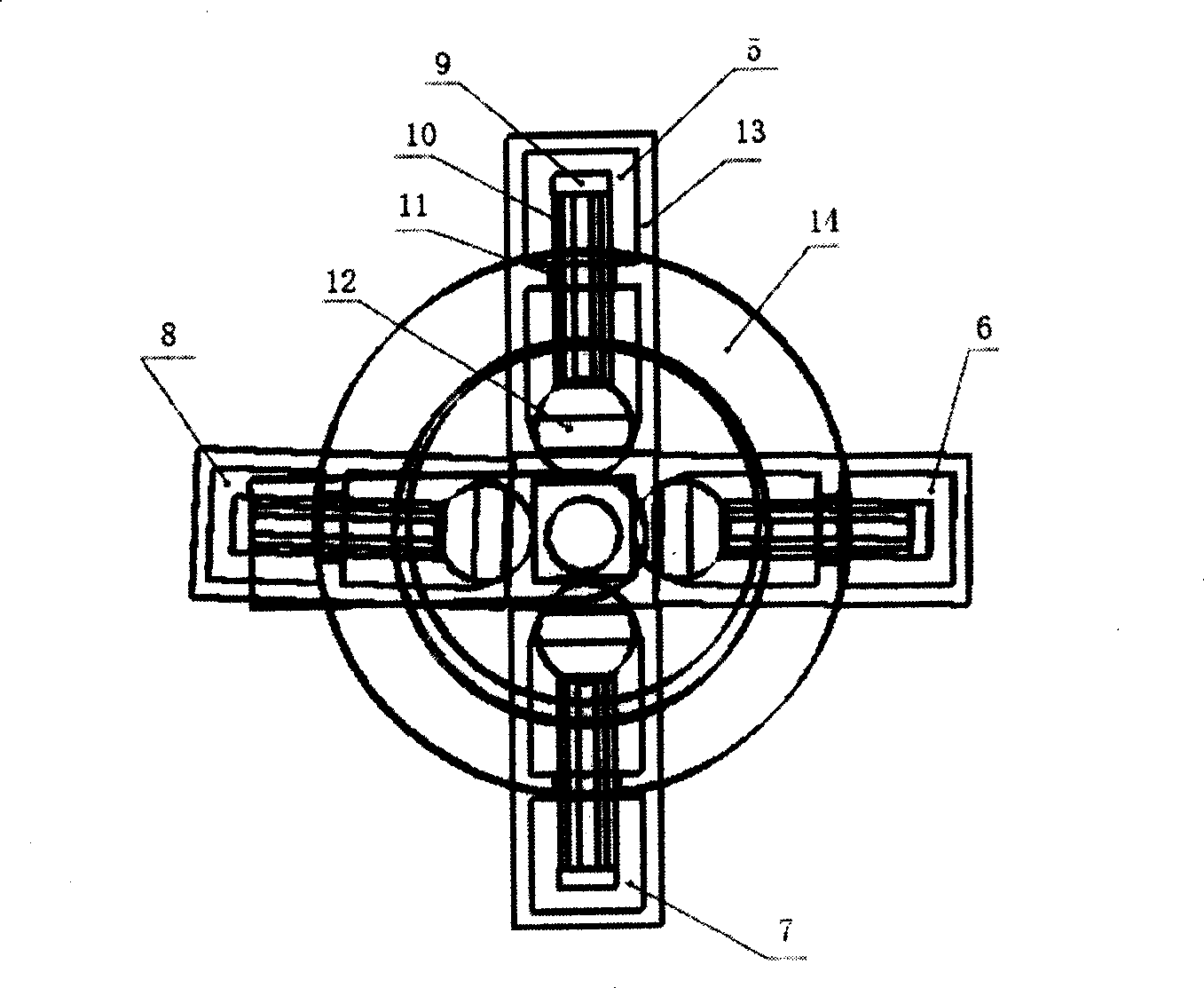
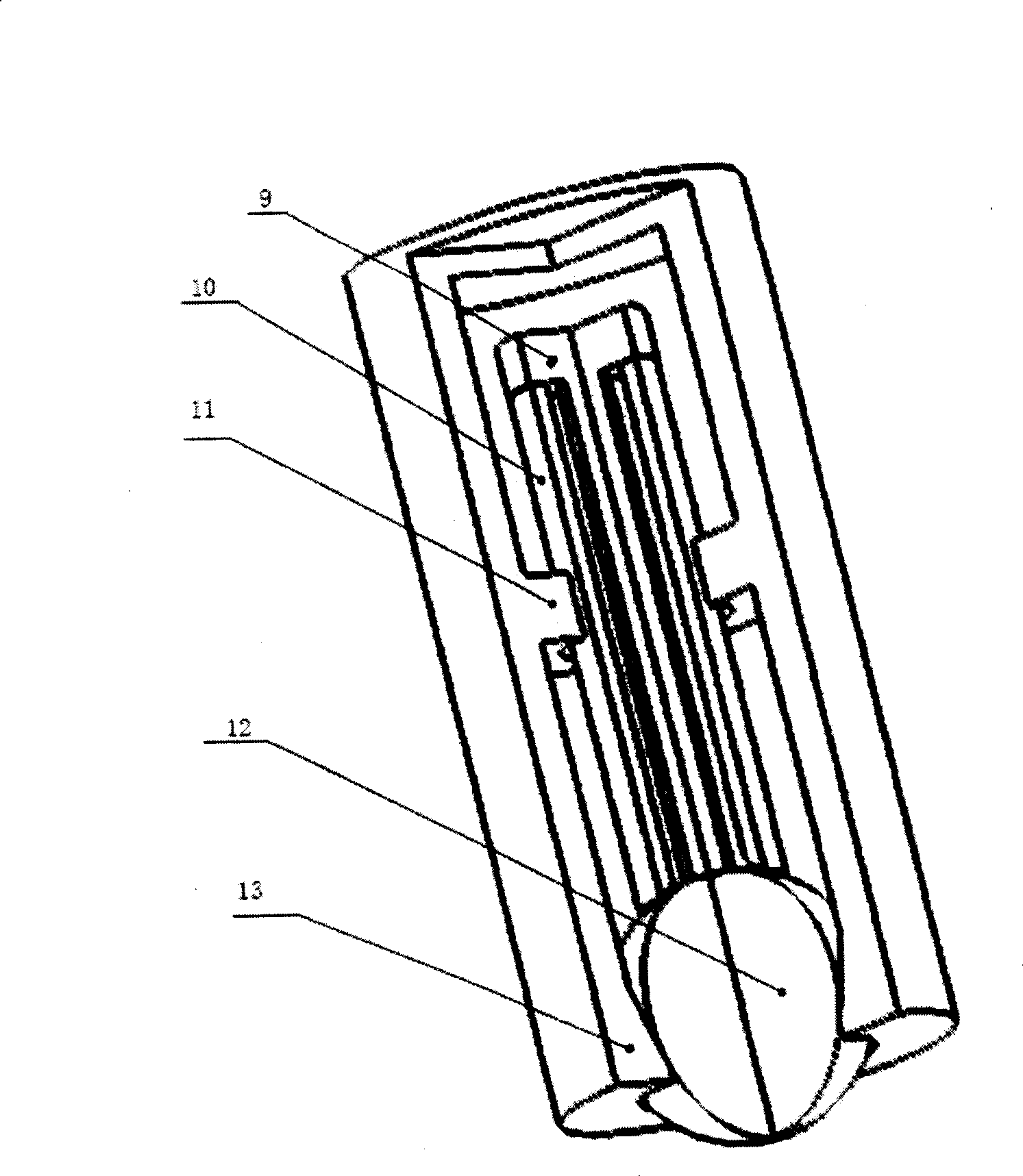
[0015] Such as figure 1 , figure 2 As shown, the present embodiment includes: mechanical arm 1, motor output shaft 2, motor 3, motor connecting shaft 4, fixed machine base 14, four variable stiffness constraining cylinders (front variable stiffness constraint) uniformly distributed along the circumferential direction of the machine base Cylinder 7, rear variable stiffness constraint cylinder 5, left variable stiffness constraint cylinder 8, right variable stiffness constraint cylinder 6).
[0016] The interconnection relationship of each component is as follows: the output ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More