

Mesa ball X-Y trace pneumatic controller
A tabletop and trajectory technology, applied in the direction of pneumatic program control, fluidic program control, and feedback control, etc., can solve the problem of unsatisfactory accuracy, speed variation range, low-speed performance, unsatisfactory trajectory tracking effect, and the impact of real-time system stability, etc. problem, to achieve the effect of improving trajectory tracking effect, improving control accuracy and stability, and reducing system interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
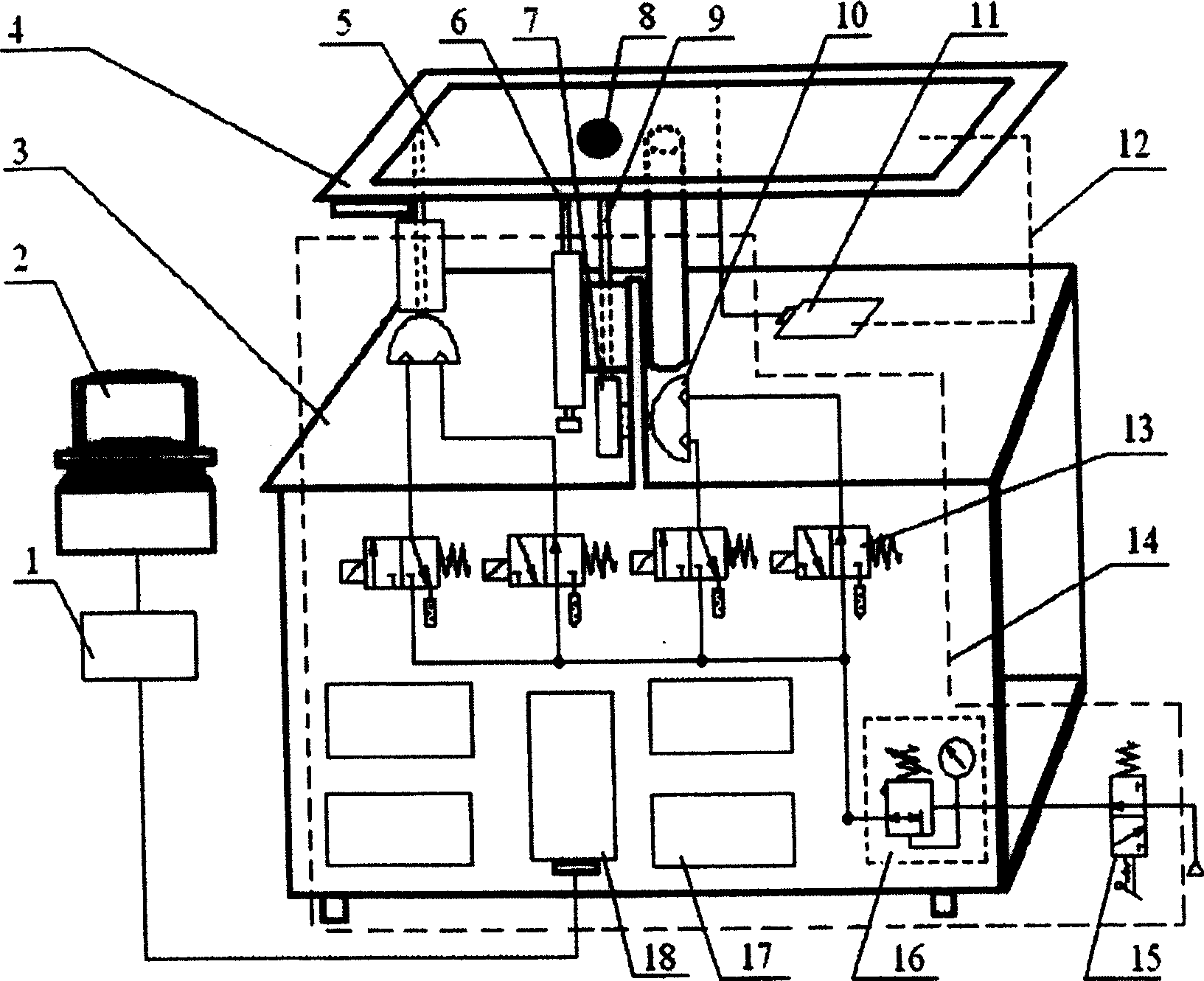
[0012] Such as figure 1 As shown, the present invention includes: a data acquisition card 1, a computer 2, a platform support 3, a platform 4, a potentiometer 6, a small ball 8, a touch screen device 12, and a platform servo device 14, and the connection mode is: the platform 4 and the platform support 3 pass through Angular bearing connection, the small ball 8 is placed on the touch screen device 12 as the controlled object, the touch screen device 12 is fixed on the platform 4, and is connected with the computer 2 through the standard RS232 bus, the potentiometer 6 is fixed on both ends of the platform bracket 3, and the data The acquisition card 1 is inserted into the PCI slot of the computer 2, and is connected to the connection terminal 18 through a data line, and the platform servo device 14 is arranged on the platform bracket 3 to drive the platform to move.
[0013] The touch screen device 12 includes: a touch screen 5 and a serial port controller 11, the connection me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More