

Finger joint steel wire coupled transmission mechanism for robot clever hand finger
A technology of transmission mechanism and dexterous hand, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of poor movement coordination, inconvenient preloading, and poor reliability, and achieve the effects of smooth movement, convenient preloading, and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
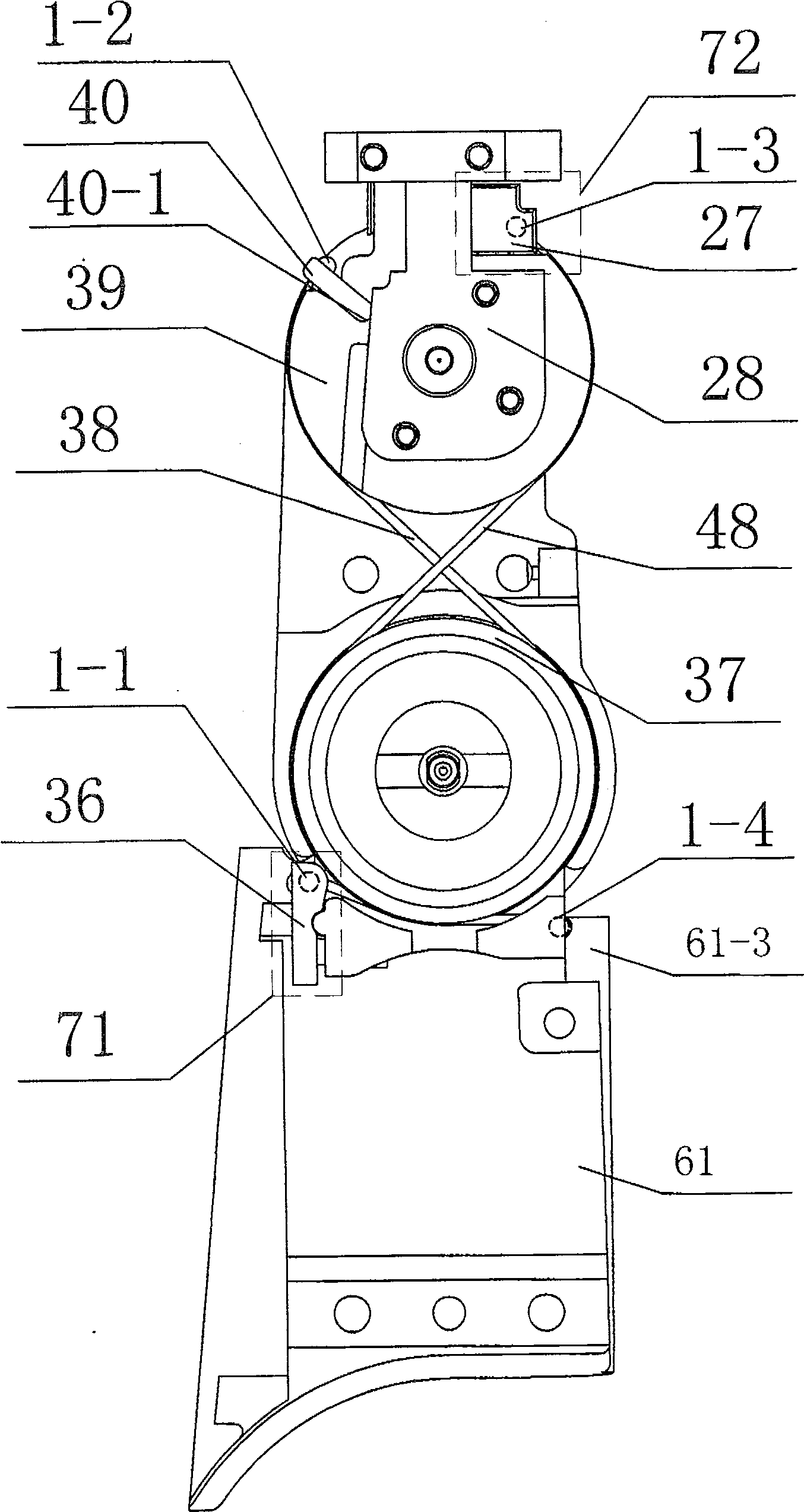
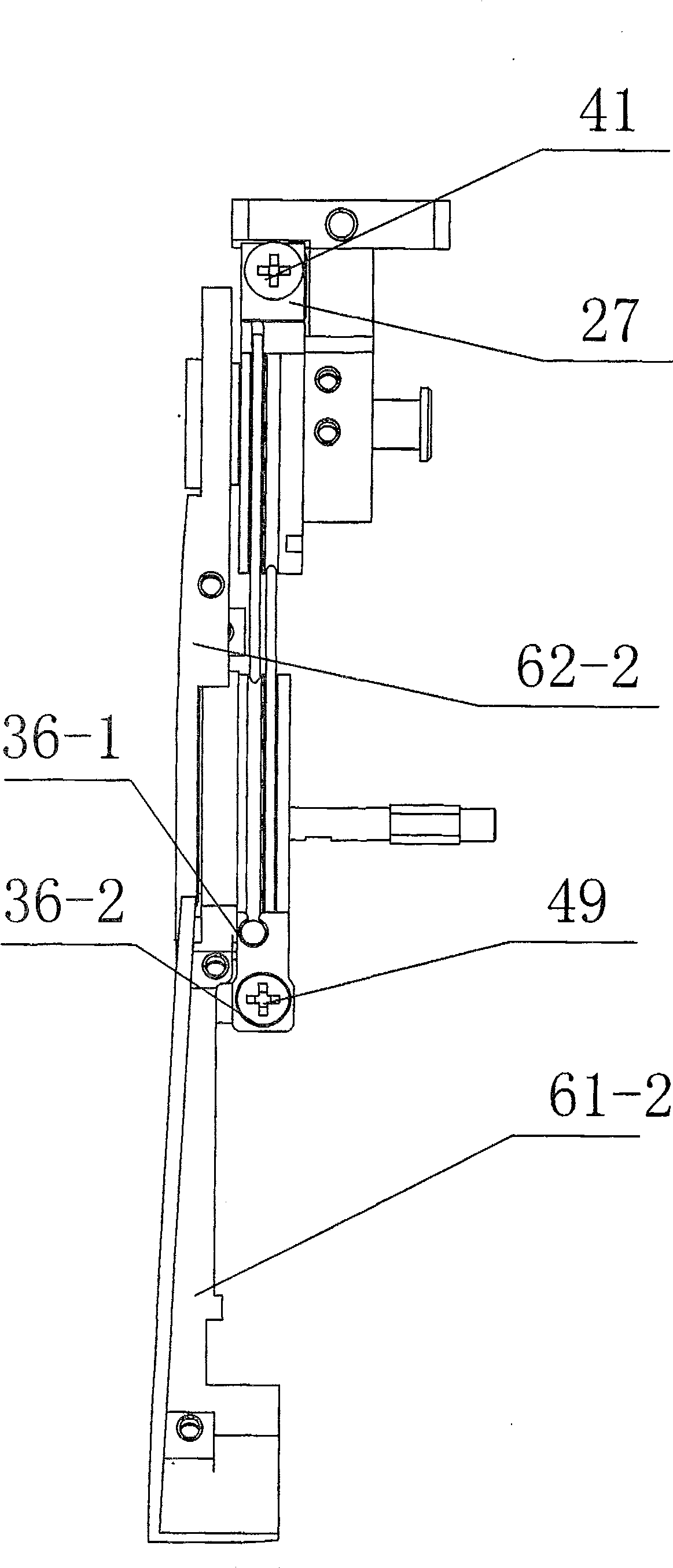
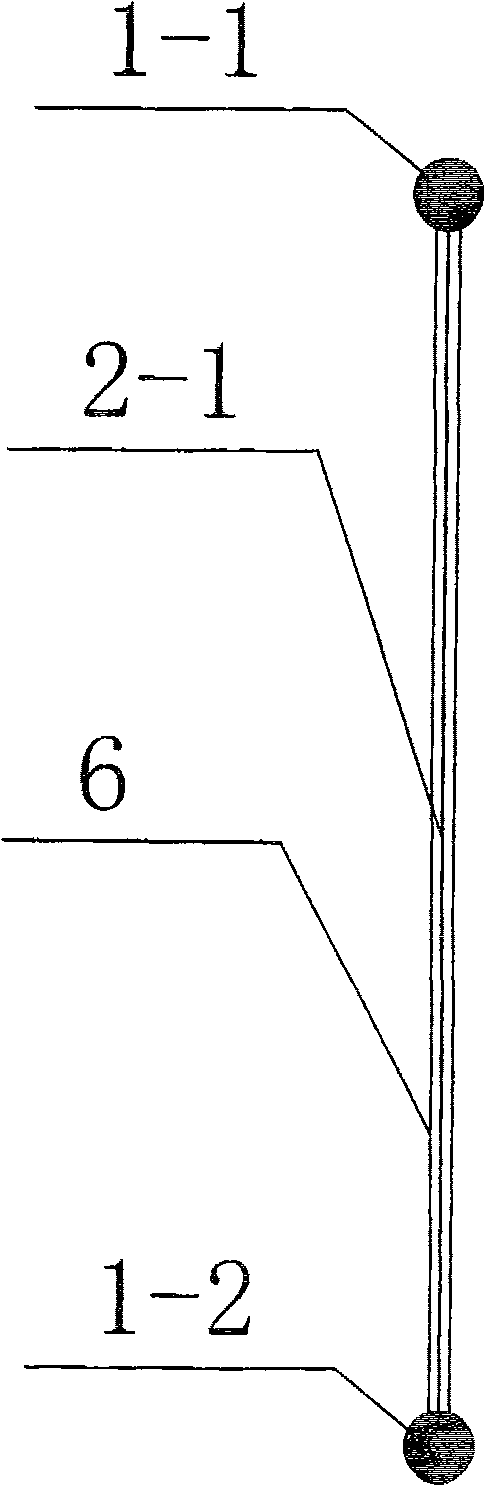
[0007] Specific implementation mode one: as figure 1 ,Figure 5, Figure 8 As shown, the robot dexterous hand finger joint steel wire coupling transmission mechanism of the present embodiment consists of the first joint steel wire wheel 37, the second joint steel wire wheel 39, the first steel wire part 38, the second steel wire part 48, the first pretensioning device 71, The second pretensioning device 72 and the steel wire clip 40 are composed. The first steel wire piece 38 and the second steel wire piece 48 are respectively wound on the first joint steel wire wheel 37 and the second joint steel wire wheel 39 and crossed into "8" font, the first steel wire 38 is composed of the first steel ball 1-1, the second steel ball 1-2 and the first steel wire 2-1, the first steel ball 1-1 and the second steel ball 1-2 respectively fixed on the two ends of the first steel wire 2-1, the second steel wire 48 is composed of the third steel ball 1-3, the fourth steel ball 1-4 and the secon...
specific Embodiment approach 2
[0009] Specific implementation mode two: as figure 1 As shown, the first joint wire wheel 37 and the second joint wire wheel 39 in this embodiment have the same diameter. With such a structure, the coupling motion of 1:1 angle is realized. Other compositions and connections are the same as in the first embodiment.
specific Embodiment approach 3
[0010] Specific implementation mode three: as image 3 ,Image 6, Figure 12 As shown, the first joint wire wheel 37 in this embodiment is provided with a first groove 3 and a second groove 3-1, and the second joint wire wheel 39 is provided with a third groove 4, The fourth groove 4-1, the two ends of the first steel wire 38 are respectively wound on the first groove 3 and the third groove 4, and the two ends of the second steel wire 48 are respectively wound on the second groove 3-1. On the fourth groove 4-1. With such a structure, the movement is stable. Other compositions and connections are the same as in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More