

Six dimensional RSS force sensor
A force sensor and parallel technology, applied in the field of automatic control, can solve the problems of difficult design and processing of elastic moving pairs and large principle errors, and achieve the effects of convenient design, small coupling between dimensions, and simple synthesis and decomposition algorithms.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
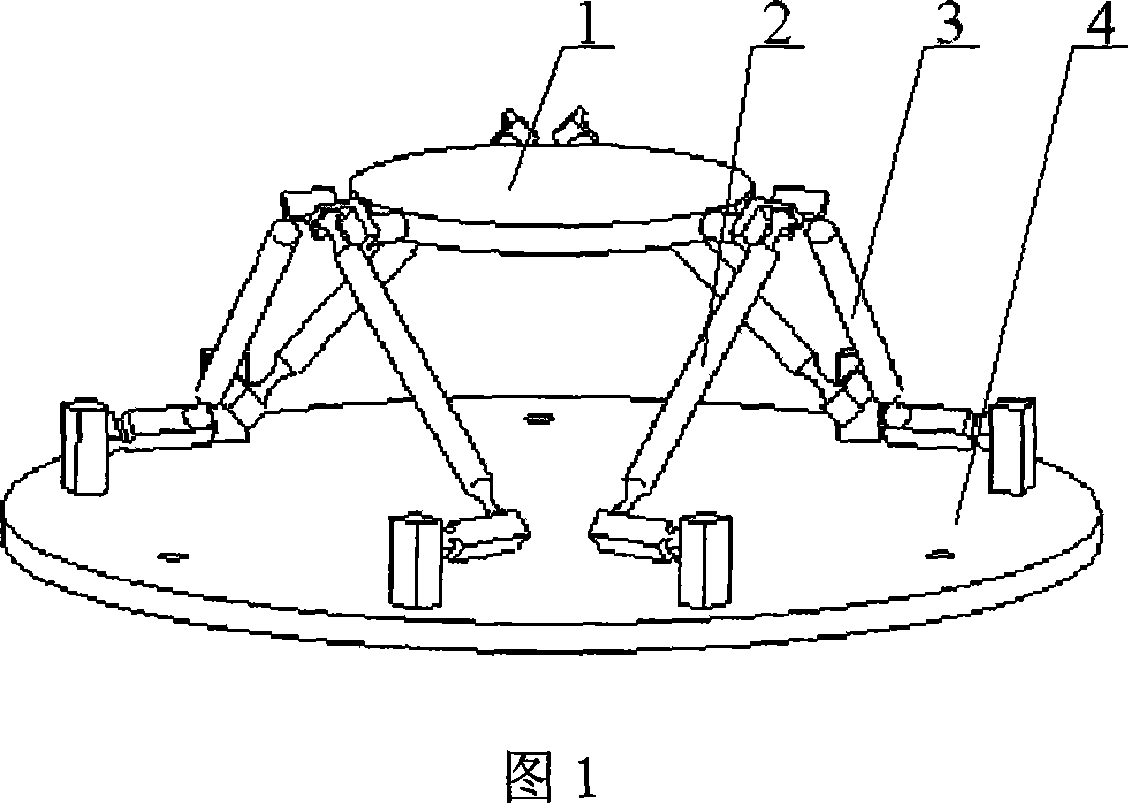
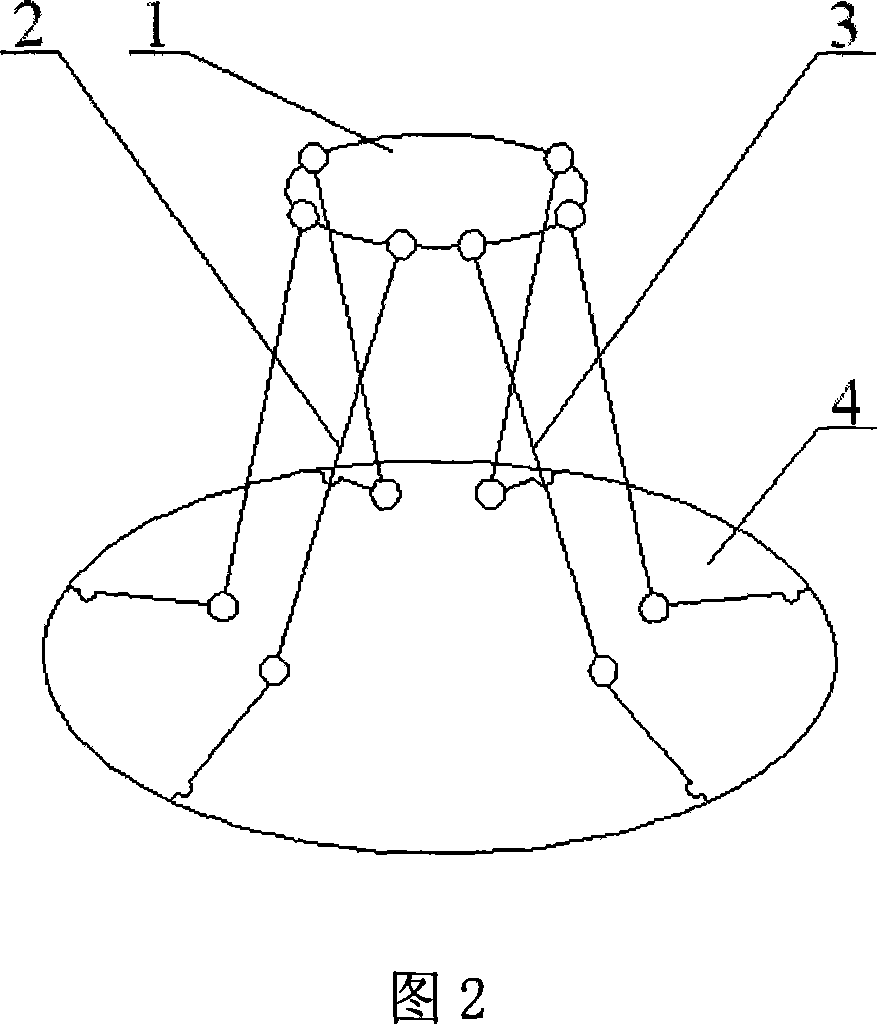
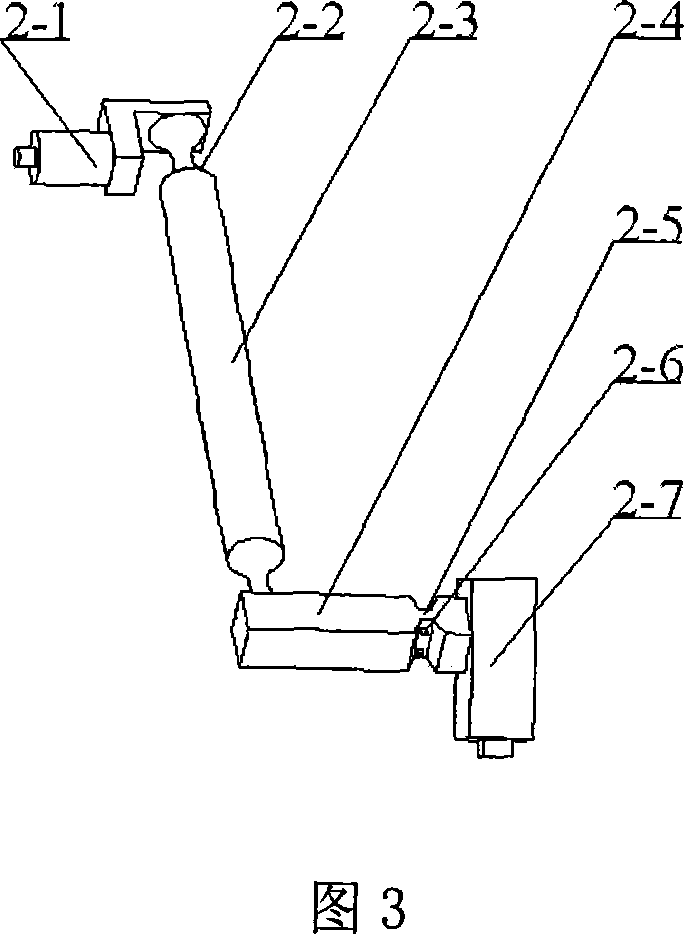
[0011] Fig. 1 is an embodiment disclosed by the present invention. The force application platform 1 and the fixed platform 4 are connected by 3 groups of branch chains, and each group of branch chains is composed of a left side branch chain 2 and a right side branch chain 3. Branches (2, 3) have the same structure but different poses. Each branch chain is made up of upper connecting rod 2-1, elastic ball pair 2-2, branch chain main rod 2-3, rotating auxiliary rod 2-4, elastic rotating pair 2-5 and lower connecting rod 2-7. The two ends of the chain main rod 2-3 are elastic ball pairs 2-2, and the elastic ball pairs 2-2 are rigidly connected with the upper connecting rod 2-1 and the rotating auxiliary rod 2-4 respectively, and the rotating auxiliary rod 2-4 is connected with the lower The rod 2-7 is rigidly connected, and the upper connecting rod 2-1 and the lower connecting rod 2-7 are respectively connected with the force application platform 1 and the fixed platform 4 by int...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More