

High precision combined posture-determining method based on optimally genetic REQUEST and GUPF
A high-precision and optimal technology, applied in attitude control and other directions, can solve non-Gaussian, nonlinear noise and other problems, improve accuracy and speed, solve system nonlinearity and noise non-Gaussian, overcome attitude determination accuracy and gyro drift Estimate the effect of low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
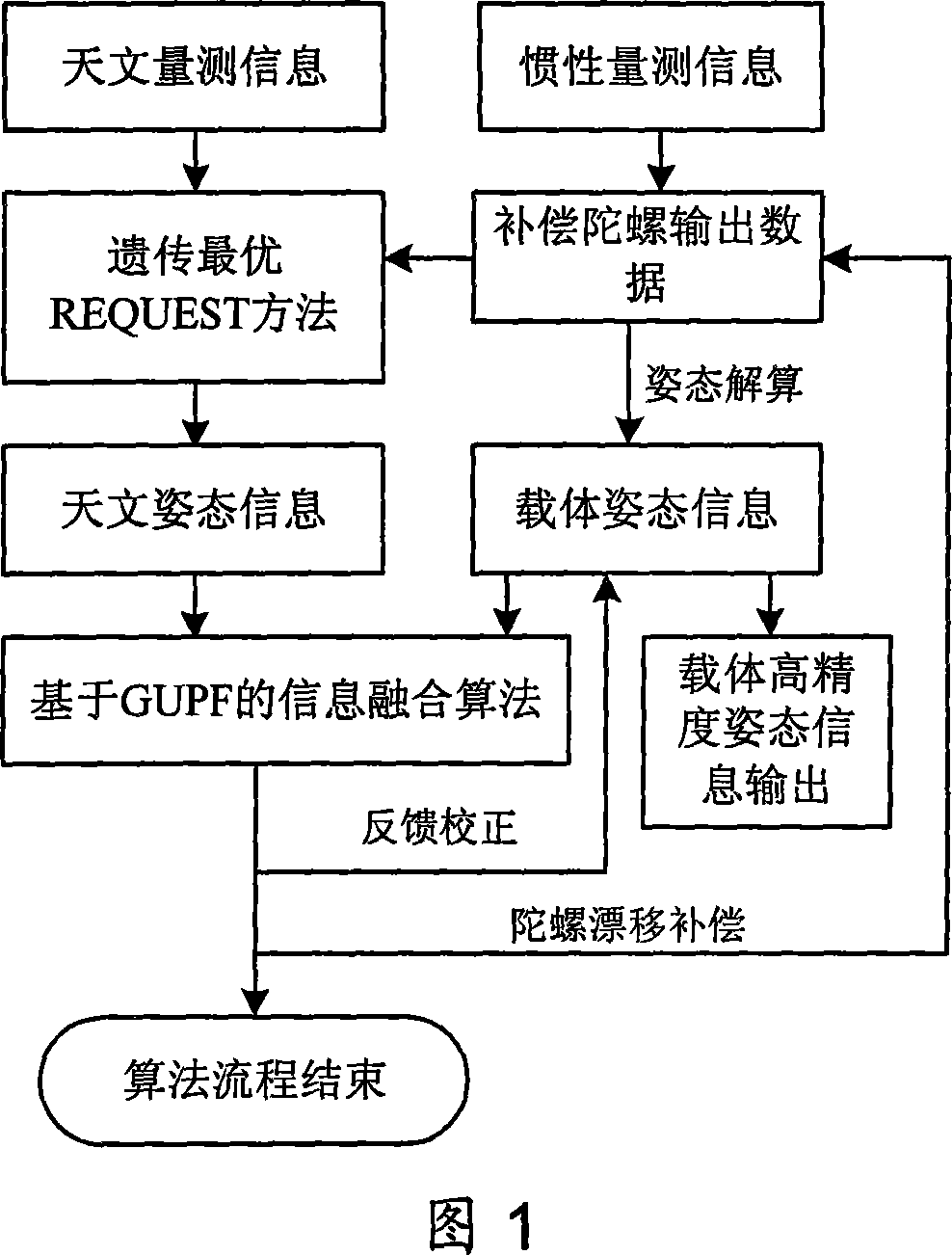
[0012] As shown in Figure 1, the specific implementation steps of the present invention are as follows:
[0013] 1. First, the inertial measurement information is obtained by compensating the gyroscope output data and attitude calculation to obtain real-time carrier attitude information. The process is as follows:
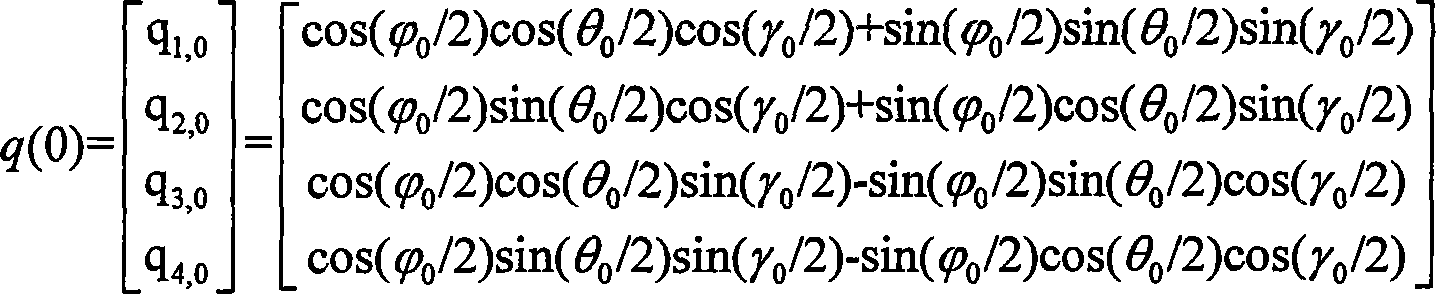
[0014] a. Set the initial posture as ( 0 θ 0 gamma 0 ), calculate the initial attitude quaternion q(0) matrix:
[0015]
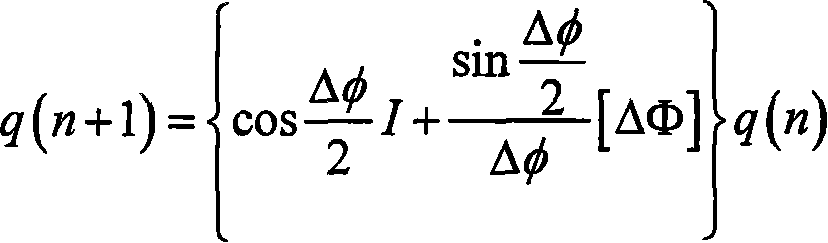
[0016] b. The update matrix is:
[0017] q ( n + 1 ) = { cos Δφ 2 I + sin Δφ 2 Δφ [ ΔΦ ] } q ( n )
[0018] n is the nth moment, I is the unit quaternion, Δφ=[Δφ X Δφ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More