

Mechanical arm
A technology of manipulators and rotating shafts, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of inability to complete free rotation around the arm shaft and inaccurate positioning, and achieve convenient and fast grasping operations, simple structure, and high work efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
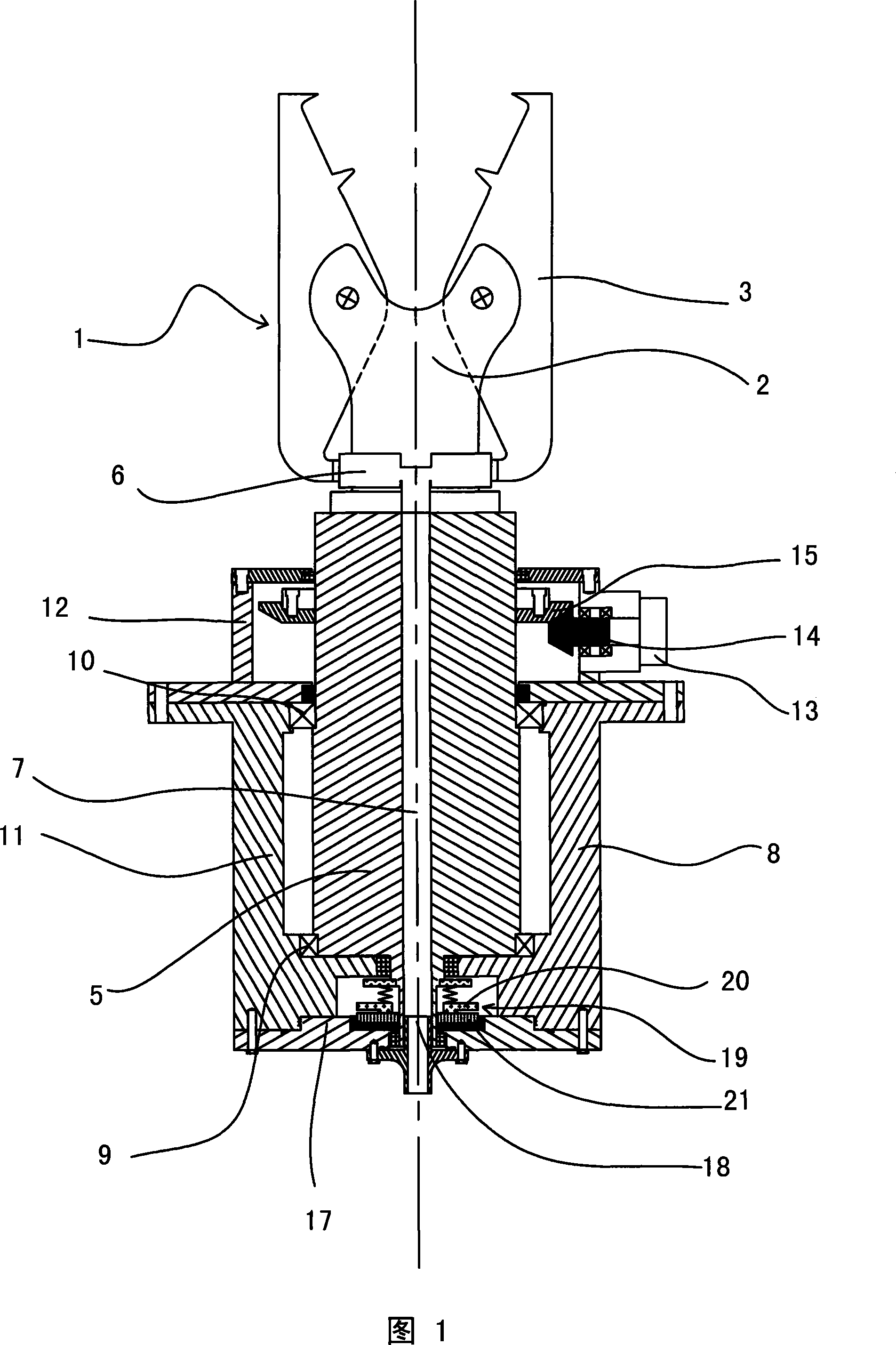
[0025] Embodiment: Referring to the accompanying drawing 1, a manipulator includes three parts: a claw 1 , a rotating shaft 5 and a shaft cylinder 8 .
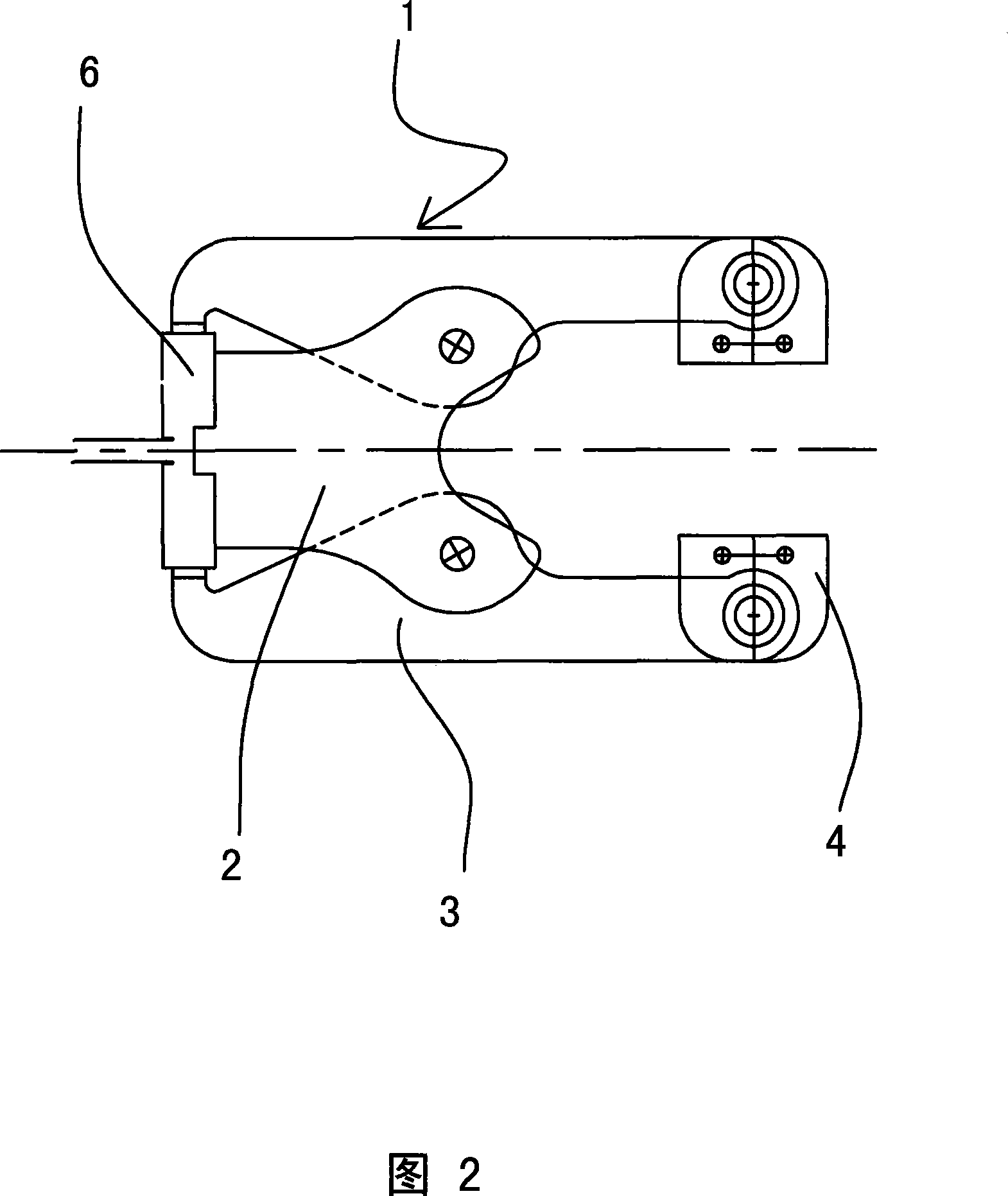
[0026] Referring to the accompanying drawing 1, the claw portion 1 is composed of a bracket 2 and two claws 3, the inner sides of the two claws 3 are provided with sharp teeth (as shown in Figure 1), and the claws 3 can also be hinged at the front end Claw surface is the claw head 4 (referring to accompanying drawing 2) of the curved surface of the suitable blank shape of band anti-skid tooth. Two finger claws 3 are symmetrical to the central axis of support 2 and are hinged on the protruding part of support 2 with the middle part, and the rear end of support 2 is connected to the rotating shaft 5 with the center of the axis, and the rear part of support 2 or the front part of rotating shaft 5 correspond to two The tail ends of the finger claws 3 are fixedly connected to a hydraulic cylinder 6 respectively, and the pistons of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More