

Seven freedom-degree artificial man arm driven by air-powered artificial muscle
A pneumatic artificial muscle and degree of freedom technology, applied in the field of humanoid arm, can solve the problems of humanoid arm mechanism design difficulties, small grip force, complex mechanism, etc., and achieve compact structure design, large output force, and large movement space Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
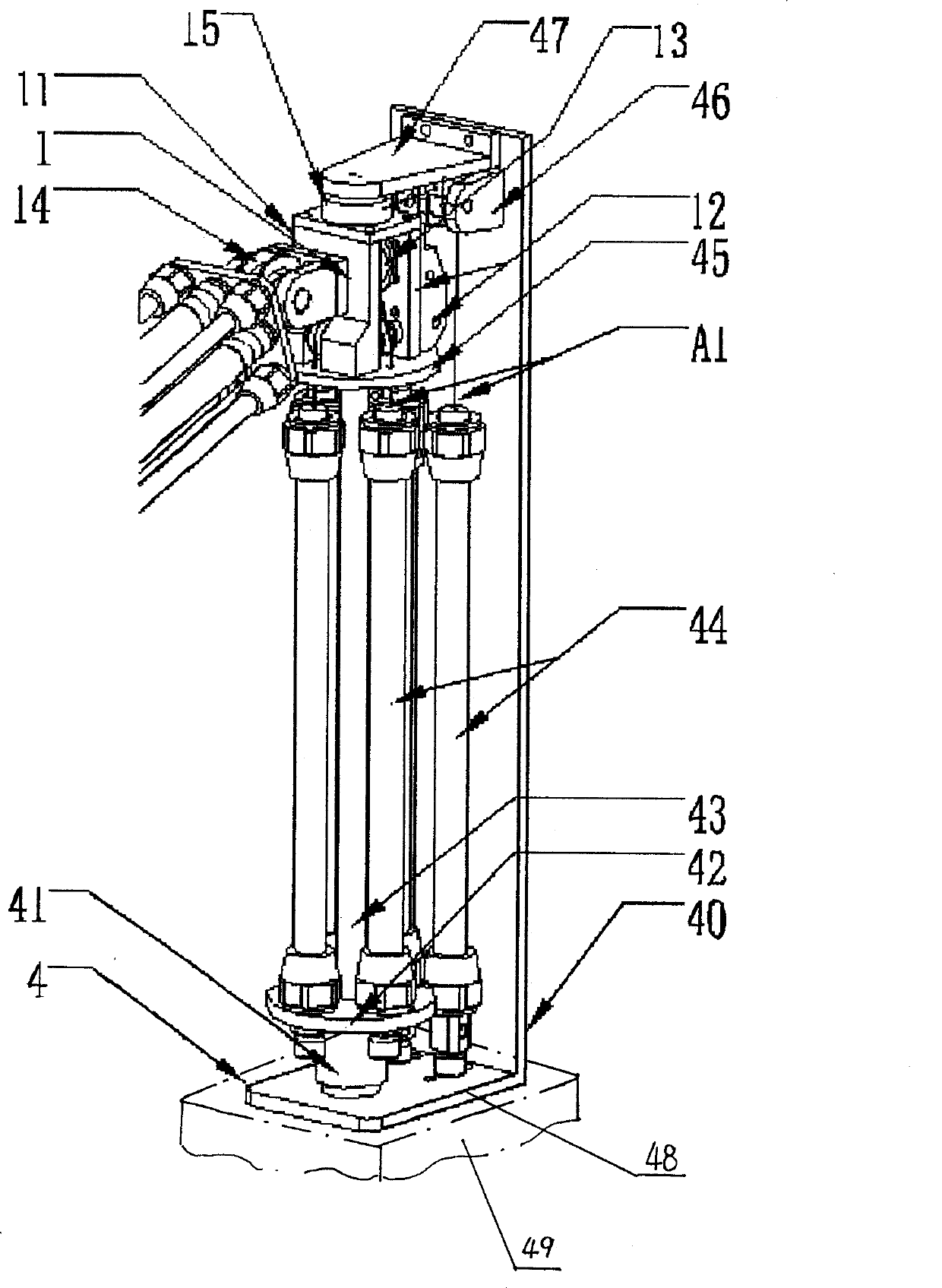
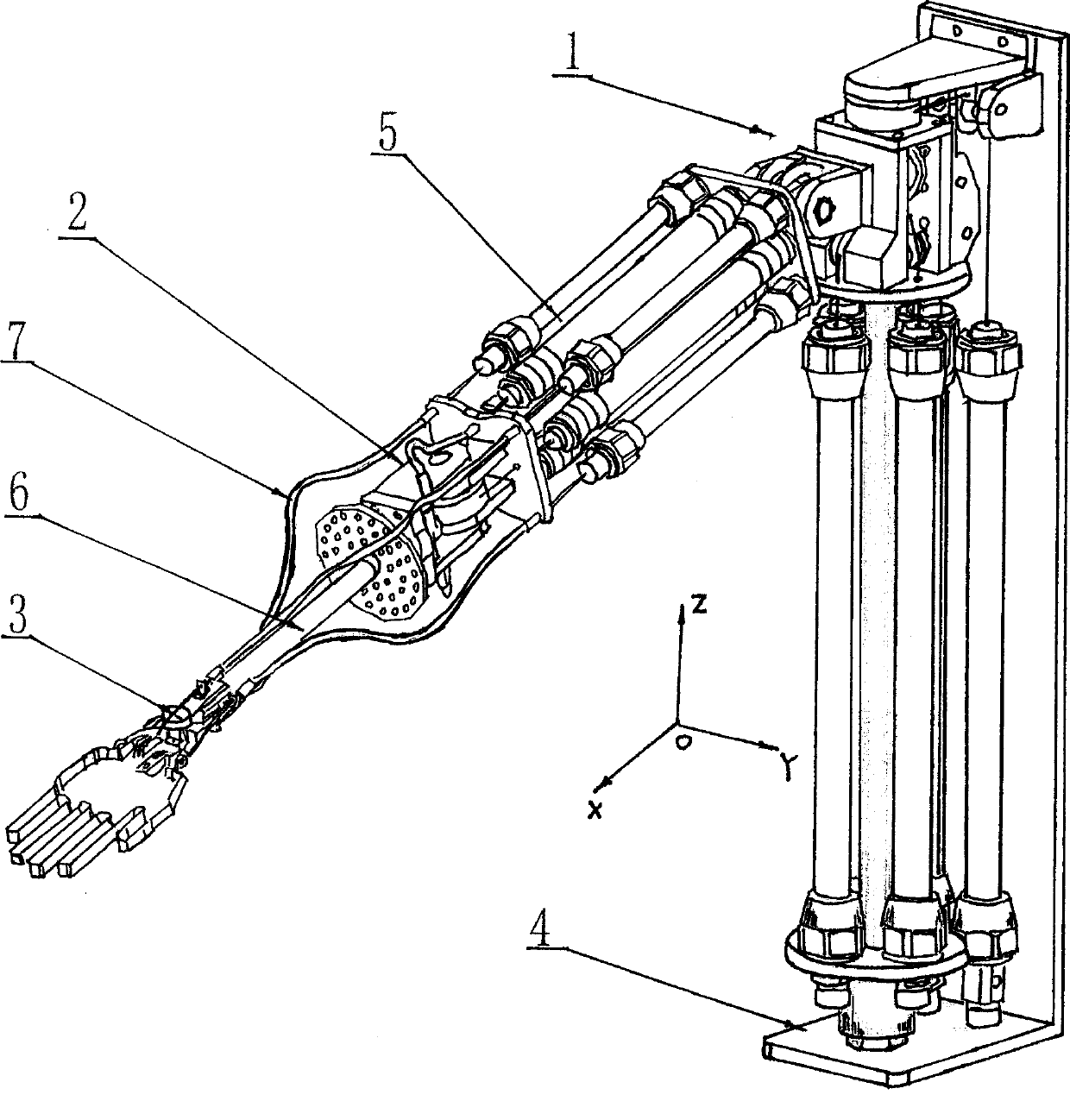
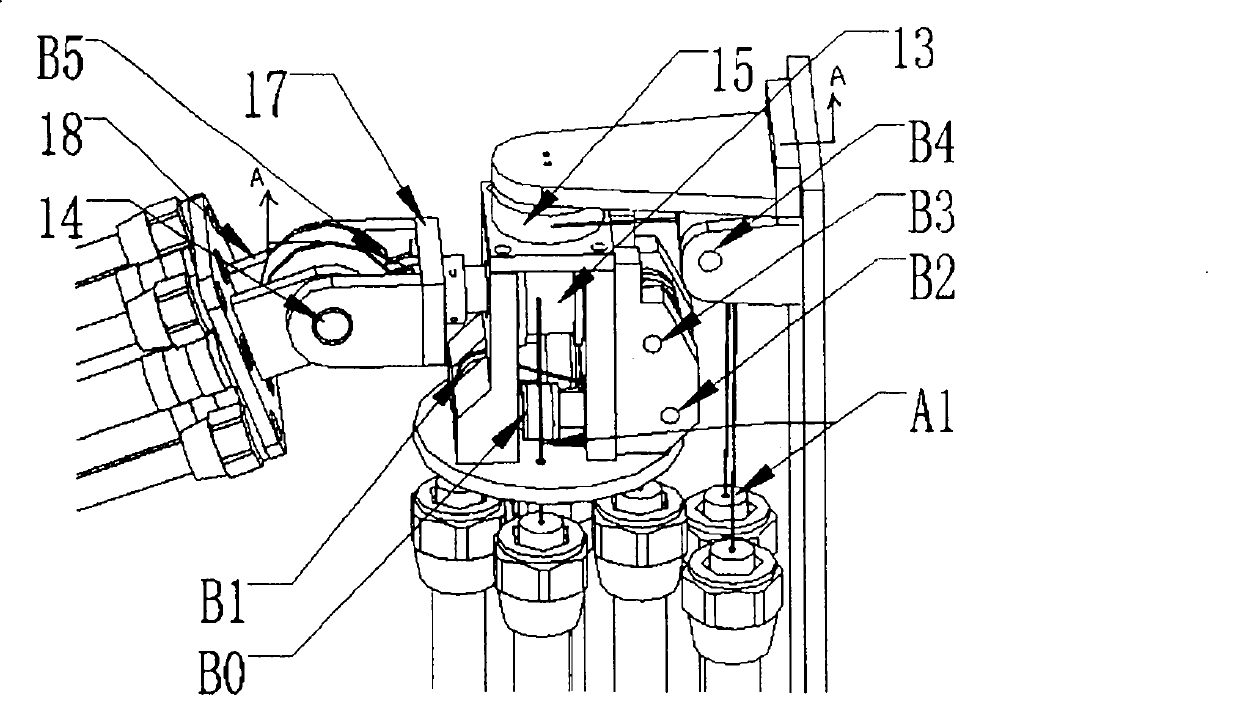
[0022] Depend on figure 1 , Figure 2A , Figure 2B , Figure 2C , image 3 and Figure 4 It shows that a seven-degree-of-freedom humanoid arm driven by pneumatic artificial muscles is mainly composed of a shoulder joint 1, an elbow joint 2, a wrist joint 3, an arm support frame 4, an upper arm 5, a forearm 6 and a flexible cable 7, wherein: Vertical plate 40, top plate 47 and base plate 48 constitute arm support frame 4, and are fixed with base 49, are fixed with pulley block support 46 on the top of vertical plate 40, by top shaft 15, front support block 11, back support block 12, top The disc 45, the pillar 43, the chassis 42 and the chassis shaft 41 are connected to form an integral structure, and are connected with the top plate 47 and the bottom plate 48 through ball bearings and thrust ball bearings, and rotate around the Z axis to drive the shoulder joint 1 to rotate around the Z axis The pneumatic artificial muscle 44 is directly fixed on the bottom plate 48 of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More