

Dynamic deviation estimation method based on gauss average value mobile registration
A mean value shifting and dynamic deviation technology, applied in the field of target tracking, can solve problems such as the decrease of estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
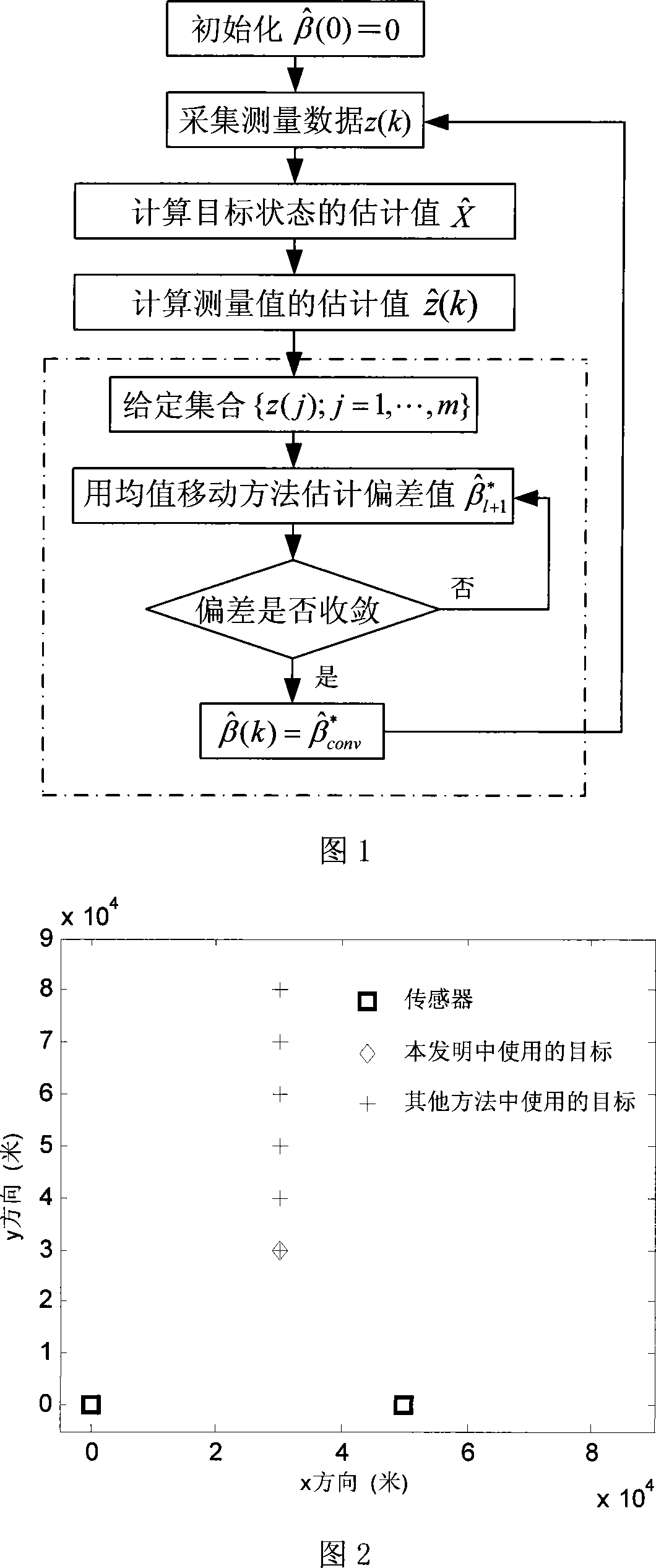
[0042] As shown in Figure 2, the coordinates of the two sensors in this embodiment are: (0,0), (0,50), unit: km, the initial state of the target is X 0 =[30000m, 40m / s, 30000m, 40m / s]', the measurement and prediction covariance matrix is P(0|0)=diag[(1000m) 2 , (50m / s) 2 , (1000m) 2 , (50m / s) 2 ]. In this embodiment, both the sensor and the target (radiation source) are in the same plane XY, and each sensor can measure the distance and azimuth of the target. The initial value of the dynamic deviation of the two sensors is b 1 =b 2 =[50m, 8mrad]', the standard...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More