

Parallel joint walking-aid exoskeleton artificial limb suitable for paralytic patient
A paralyzed patient and exoskeleton technology, applied in the field of rehabilitation engineering, can solve the problems of low mechanism control accuracy, small joint rotation range, small load capacity, etc., and achieve the effect of large mechanism rigidity, large rotation range, and large output torque.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
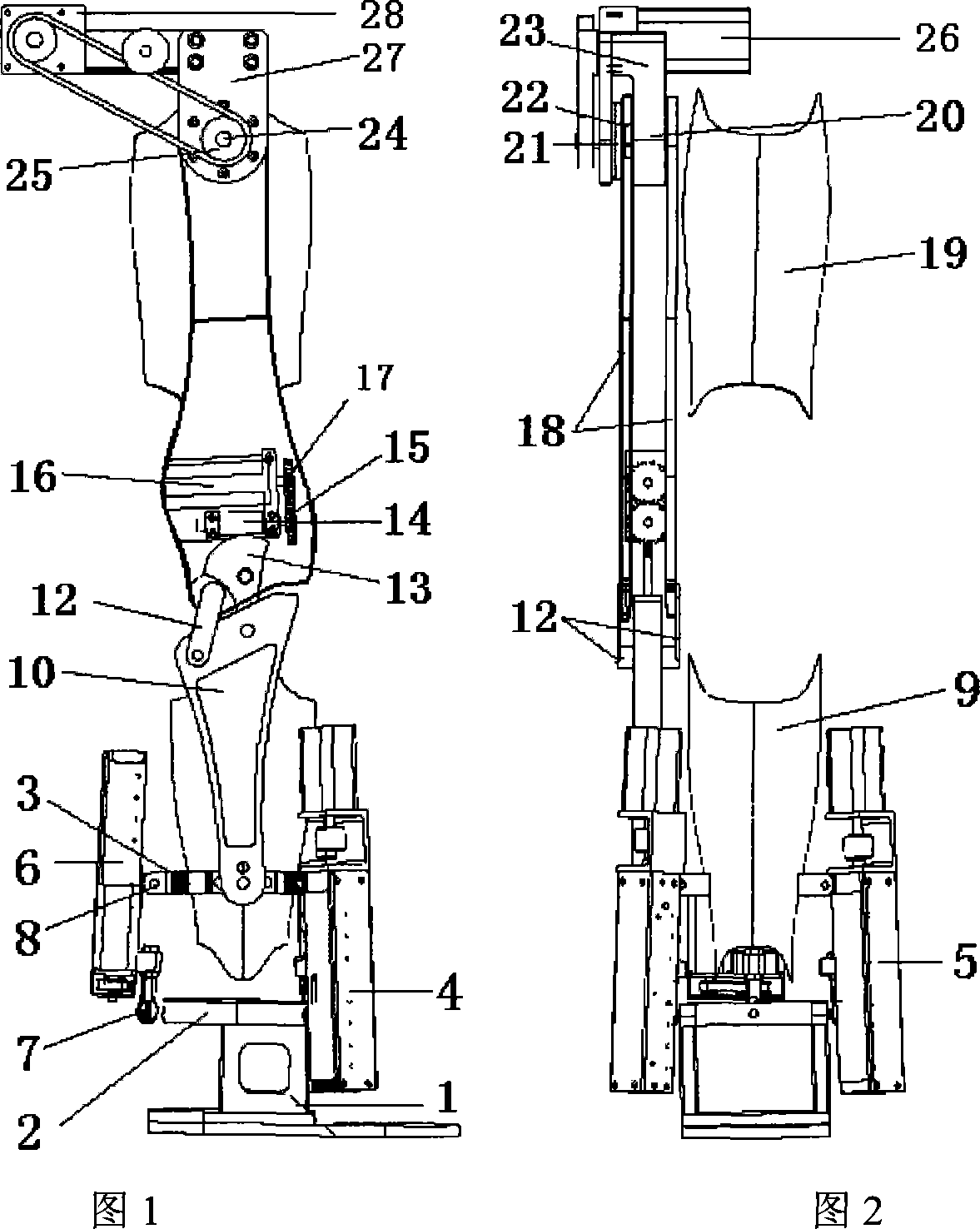
[0025] As shown in Figures 1 and 2, this embodiment includes: a hip joint, a knee joint and an ankle joint, and the hip joint, knee joint and ankle joint are connected in sequence to form a human lower limb exoskeleton prosthesis structure.
[0026]The ankle joint includes: plantar support plate 1, lower platform 2, upper platform 3, first active branch chain guide rod 4, second active branch chain guide rod 5, third active branch chain guide rod 6, humanoid Leg jacket 9, wherein: one end of the first active branch chain guide rod 4, the second active branch chain gui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More