

Ground to wall transition wall gecko-intimating robot
A robot and gecko imitation technology, applied in motor vehicles, toys, automatic toys, etc., can solve problems such as the inability to realize the transition from the ground to the wall, and achieve the effect of maintaining stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
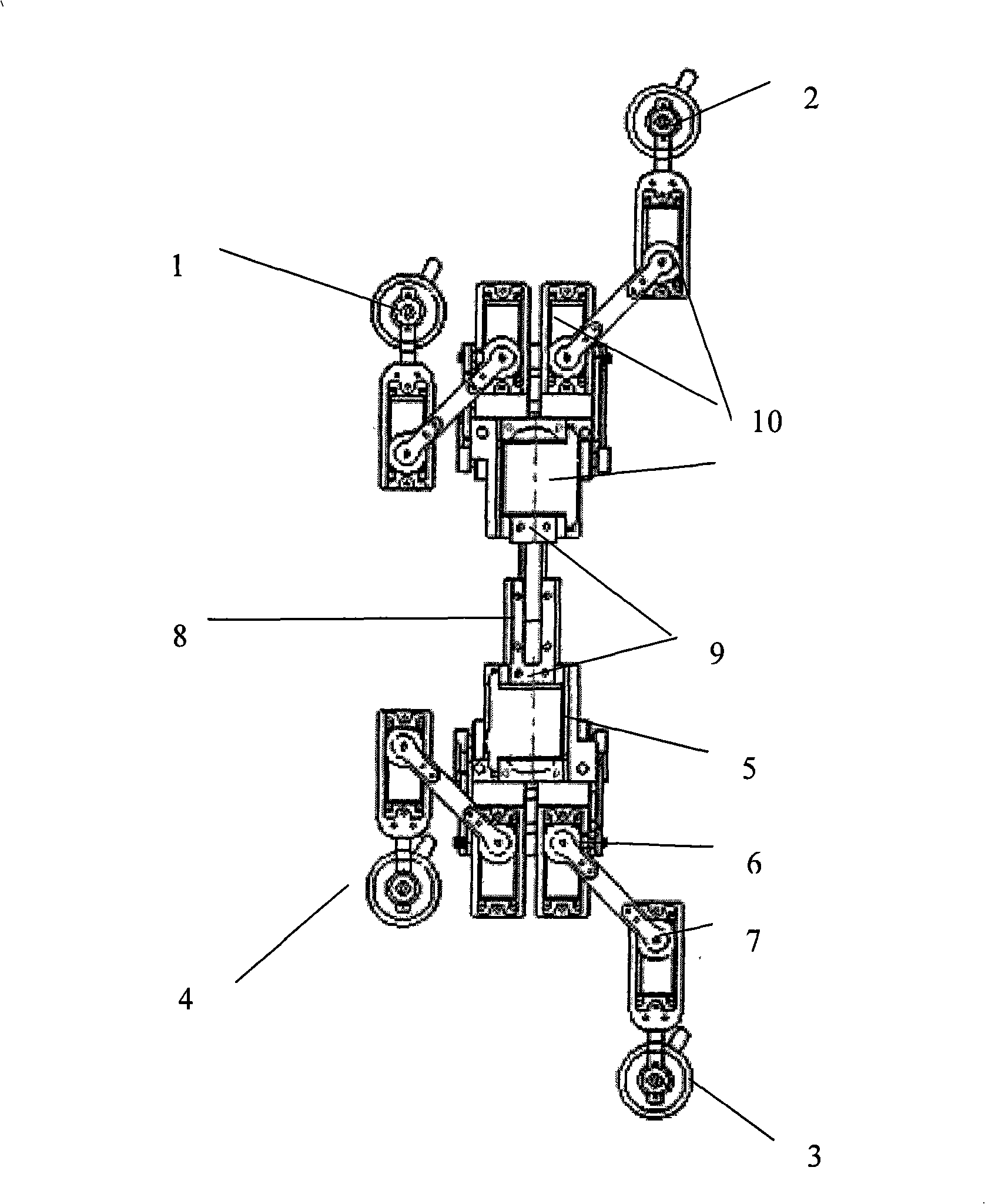
[0032] Such as figure 1 Shown, imitation gecko robot of the present invention adopts quadruped crawling mode, and it is made up of mechanical part and circuit part. The mechanical part is divided into the front working part and the rear working part, and the two parts are completely symmetrical in structure and interchangeable. The front working part and the rear working part are respectively composed of the robot body 9, four legs 1, 2, 3, 4 and four soles. The four soles adopt a damping joint structure, so that the soles of the feet have a fixed position when they are suspended in the air, and the angle can be adjusted freely when absorbing. , to adapt to different wall conditions; each leg consists of three controllable degrees of freedom of the thigh joint 6, calf joint 7 and leg joint 5, each of the two ends of the thigh joint 6, one end of the calf joint 7 and the leg joint One end of the joints 5 is hingedly connected together by a steering gear 10, each joint is drive...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More