

Five degree of freedom ectoskeleton type upper limb rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of robotics, can solve problems such as single type, small range of motion, and insufficient consideration of clinical problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
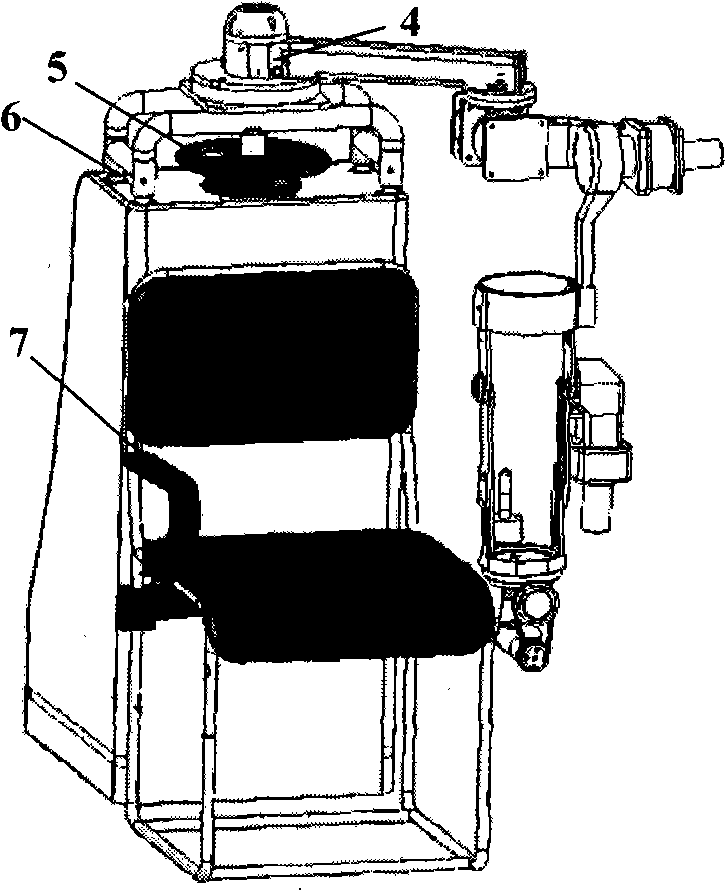
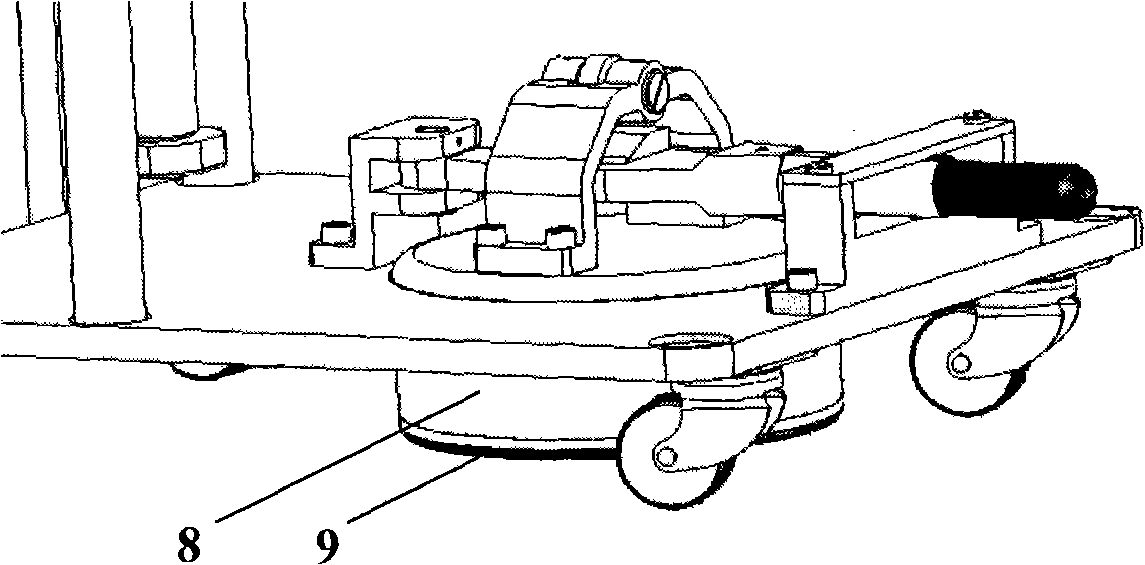
[0019] combine figure 2 , the composition of the five-degree-of-freedom exoskeleton upper limb rehabilitation robot includes a mounting frame for installing the robot, the robot is connected to a control cabinet with a display and a keyboard, the mounting frame is designed with a guide rail 6, and a lifting frame is installed on the guide rail. Adjusting mechanism, the rotatable mounting arm 4 is installed on the lifting frame through the rotating shaft, combined with image 3 , consisting of a shoulder, an upper arm, a forearm, an arm, and a handle 3 (the arm body only includes the shoulder, the upper arm above the elbow, the forearm from the elbow to the wrist, and the handle below the wrist, and the handle below the wrist) The main body of the rehabilitation robotic arm is installed on the installation arm. The cross shoulder and the installatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More