

Reflection surface system capable of spacing expansion
A reflective surface and space technology, applied in the field of aerospace, can solve the problems of difficult application of large-scale deployable devices, difficulty in ensuring surface accuracy, and low surface accuracy, and achieve the goals of reducing quality, high configuration accuracy, and improving configuration accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
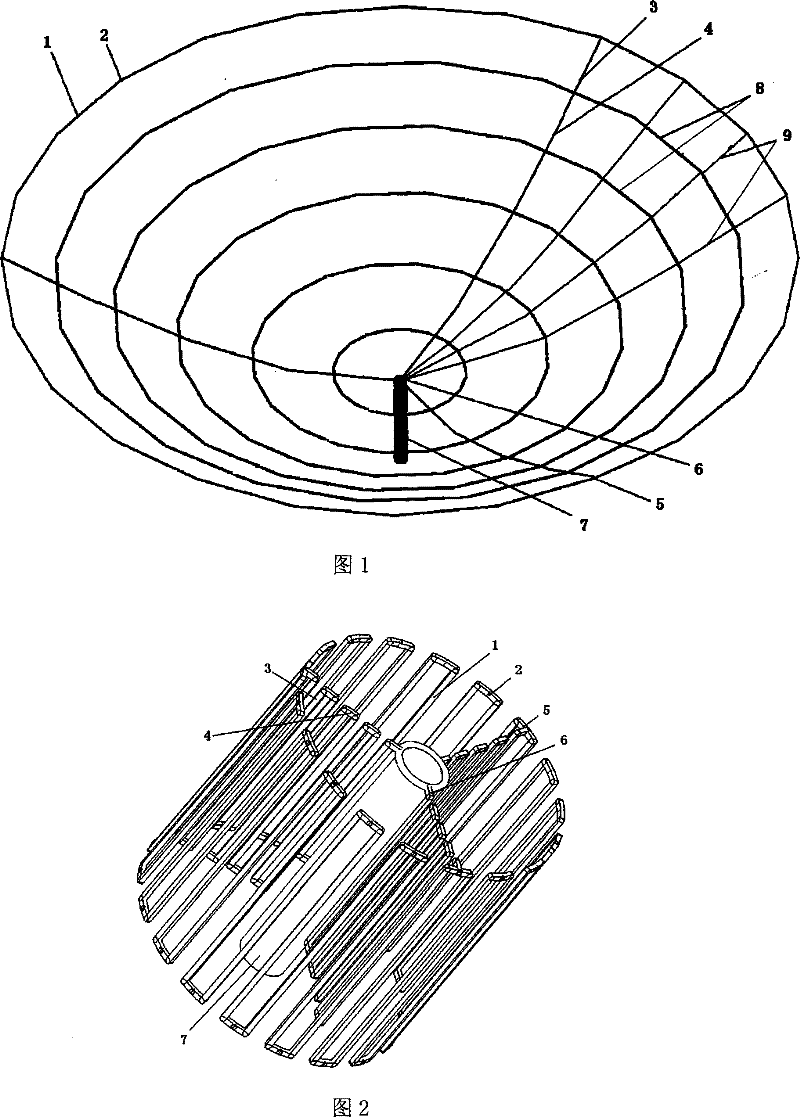
[0061] Example 1, developing a hemispherical reflector system with a diameter of 16m
[0062] The collapsed state of the device is as figure 2 As shown, the expanded state is as figure 1 shown.
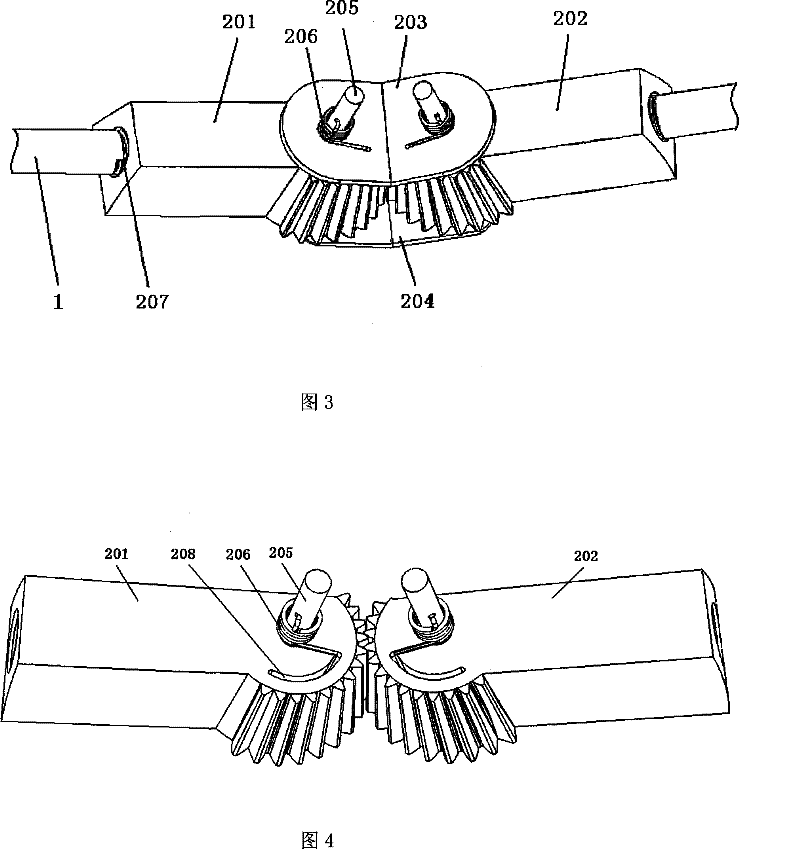
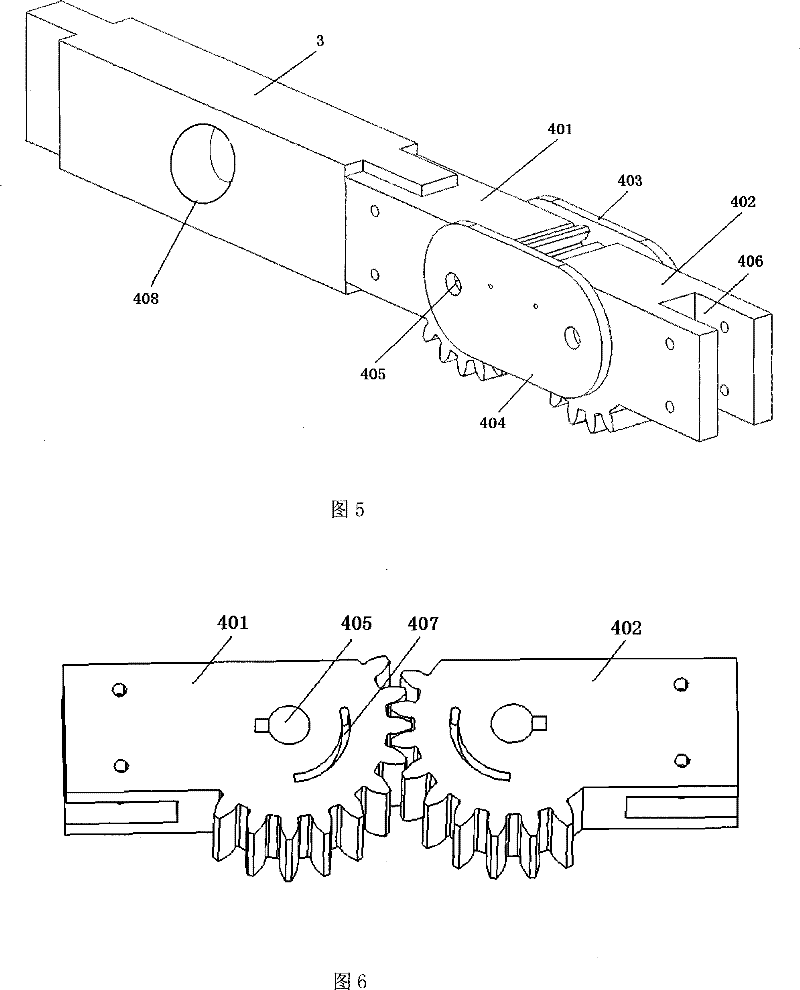
[0063] There are 36 ring rods on the caliber ring structure, and a total of 24 rib rods on the radial three supporting rib structures. Both the ring bar and the rib bar are straight single bars with a rectangular hollow section with an outer dimension of 0.025m×0.020m and an inner dimension of 0.020m×0.016m. The ring rod connection joint adopts image 3 The two-part bevel synchronous gear mechanism driven by the torsion spring shown in . The connection angle of the two synchronous mechanisms is 170 degrees. The rib-rod connection joint adopts Figure 5 Two cylindrical synchronous gear mechanisms driven by torsion springs shown in . The ring bar and the rib bar adopt the Figure 5 The groove structure shown in the figure is respectively assembled with the ring-rod connecting j...
example 2
[0065] Example 2, deploying a rotating parabolic system with a diameter of 60m.
[0066] The collapsed state of the device is as Figure 13 shown.
[0067] There are 96 ring rods on the caliber ring structure, and a total of 120 rib rods on the six radial support rib structures. The ring rod adopts an arc single rod with a circular tube section with an outer diameter of 0.03m and an inner diameter of 0.02m; the rib rod adopts a hollow structure straight single rod with a rectangular solid cross section of 0.03m×0.02m. The focal diameter ratio of a paraboloid is 0.5. The ring rod connection joint adopts image 3 The two conical synchronous gear mechanisms driven by the torsion spring shown in , the connection angle of the two synchronous mechanisms is 176.25 degrees, and the ring rod adopts image 3 The sleeve structure shown in the threaded assembly with the ring rod connection joint. The rib-rod connection joint adopts Figure 5 The two cylindrical synchronous gear mech...
example 3
[0069] Example 3, develop a rotating paraboloid system with a diameter of 6m.
[0070] The unfolded state of the device is as Figure 18 shown.
[0071] There are 12 ring rods on the caliber ring structure, and a total of 24 rib rods on the six radial support rib structures. Both the ring bar and the rib bar are straight single bars with a rectangular solid cross-section with a size of 0.008m×0.006m. The focal diameter ratio of a paraboloid is 0.3. The ring rod connection joint adopts image 3 The two conical synchronous gear mechanisms driven by the torsion spring shown in , the connection angle of the two synchronous mechanisms is 150 degrees. The rib-rod connection joint adopts Figure 5 Two cylindrical synchronous gear mechanisms driven by torsion springs shown in . The ring bar and the rib bar adopt the Figure 5 The groove structure shown in the figure is respectively assembled with the ring-rod connecting joint and the rib-rod connecting joint. The central cylin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More