

Operation robot needle-insertion positioning device under magnetic sensor environment
A surgical robot and magnetic sensor technology, applied in the directions of manipulators, trocars, micro-manipulators, etc., can solve the problems of single needle insertion positioning direction and the sensor can not work normally, and achieve the effect of solving the single needle insertion angle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
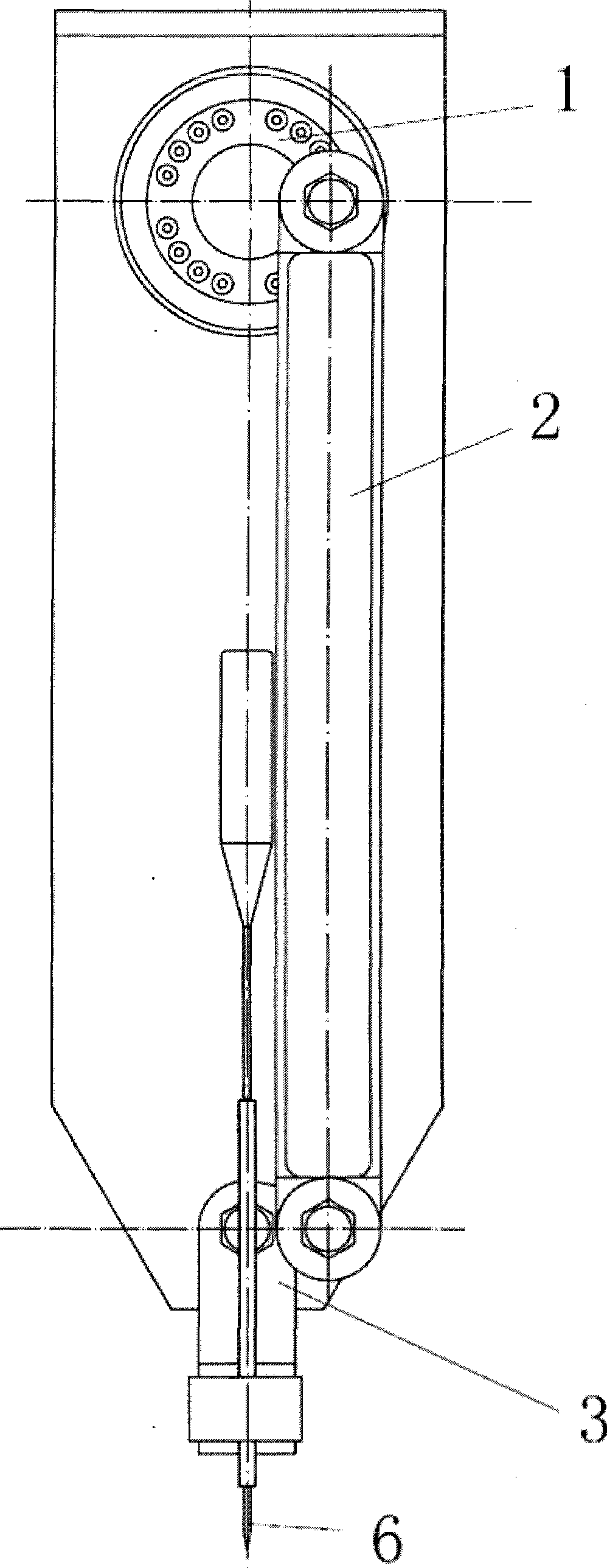
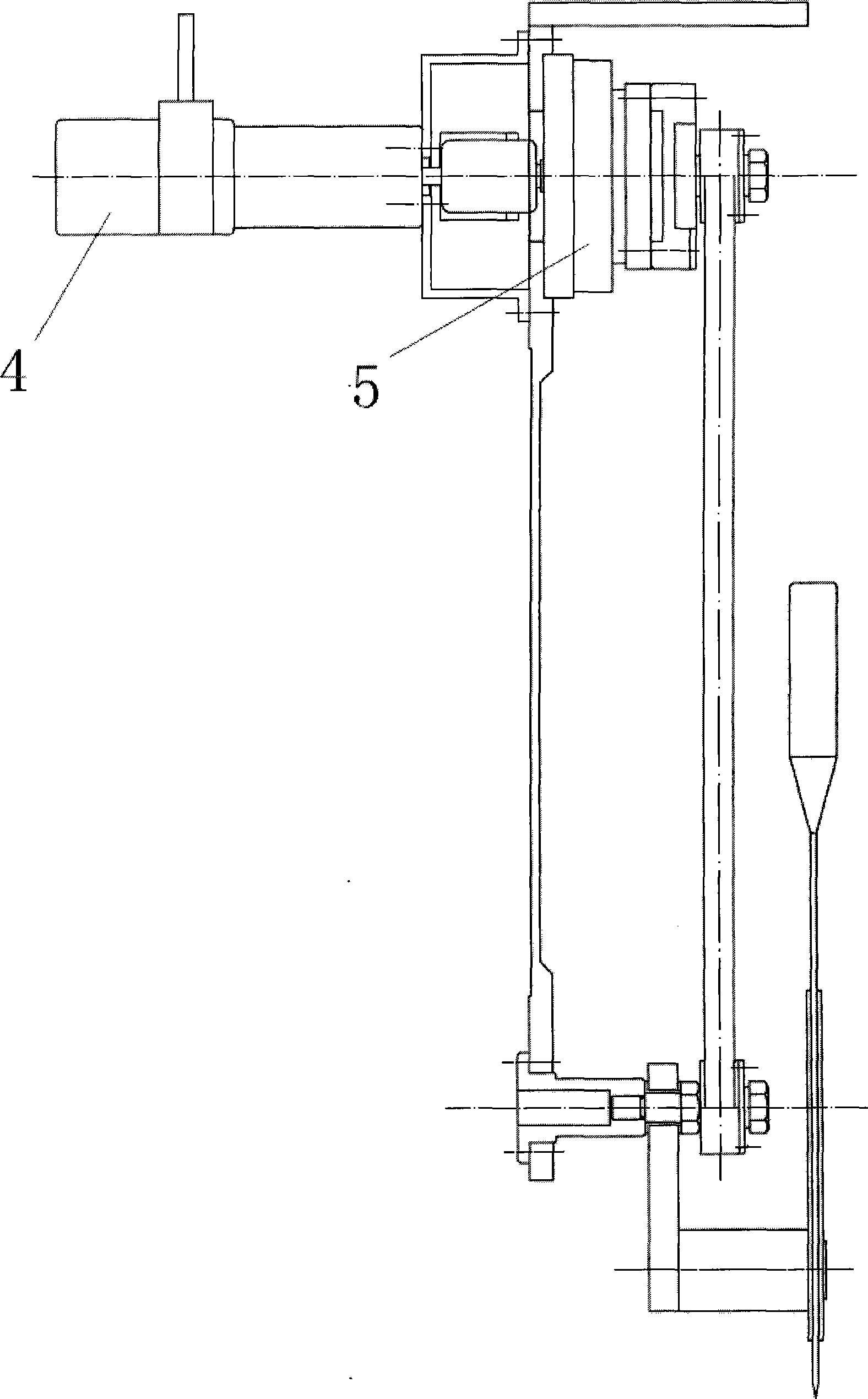
[0013] The needle insertion positioning device for a surgical robot in the environment of a magnetic sensor according to the present invention will be described below with reference to the embodiments, but it is not intended to limit the present invention.
[0014] Such as figure 1 with figure 2 As shown, in the embodiment, the device uses a parallelogram linkage mechanism to transmit motion, and the parallelogram linkage mechanism includes a short rod 1 at the input end, a long rod 2 at the input end, and a short rod 3 at the output end. The short rod 1 at the input end adopts a disc-shaped structure, which is consistent with the shape of the harmonic reducer, and is directly fixed on the harmonic reducer. It has a compact structure, and its rotation axis is the same as the motor axis; One end of the rod 2 is hinged with the short rod 1 at the input end, and the motion output by the DC motor 4 and the reducer 5 is transmitted to the short rod 3 at the output end through the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More