

Inertia/gravity combined navigation semi-physical object simulating device
A technology of combined navigation and simulation device, applied in directions such as navigation through speed/acceleration measurement, can solve problems such as high cost, large size of gravity-assisted navigation system, complex structure, etc., achieve low cost, improve evaluation ability and demonstration effect, Experiment with quick results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
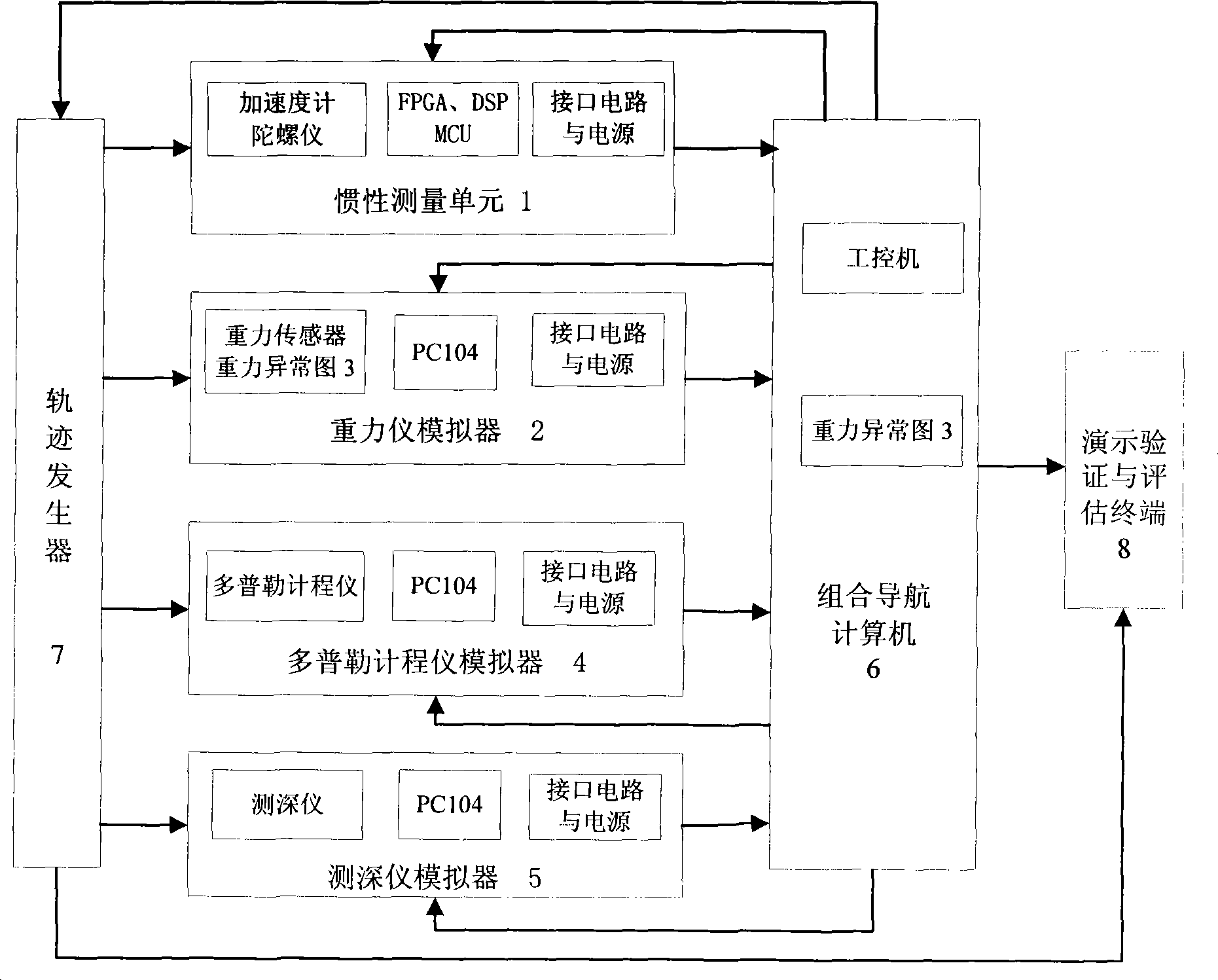
[0015] Inertial measurement unit 1 adopts 3 quartz flexible accelerometers, 3 fiber optic gyroscopes, AD conversion module, large-scale programmable logic gate array FPGA, floating point digital signal processor DSP, central processing unit MCU, I / O interface circuit and power supply, FPGA realizes the logic circuit of collecting gyroscope and accelerometer signal, dual-port RAM and DSP, the function of DSP is to read gyroscope and accelerometer data from FPGA, carry out digital signal processing, strapdown navigation solution, and The calculated navigation parameters are written into the FPGA, and the MCU communicates with the DSP through the dual-port RAM, and is responsible for data acquisition and other input and output tasks. Gravity meter simulator 2 is composed of high-precision accelerometer gravity sensor, PC104 computer, I / O interface circuit and power supply, which is equipped with global digital gravity anomaly map; digital gravity anomaly image 3 It is composed o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More